在无参考图像的质量评价中,图像的清晰度是衡量图像质量优劣的重要指标,它能够较好的与人的主观感受相对应,图像的清晰度不高表现出图像的模糊。本文针对无参考图像质量评价应用,对目前几种较为常用的、具有代表性非深度学习清晰度算法进行讨论分析,为实际应用中选择清晰度算法提供依据。
1. Brenner 梯度函数
Brenner梯度函数是最简单的梯度评价函数,它只是简单的计算相邻两个像素灰度差的平方,该函数定义如下:
其中:f(x,y) 表示图像f对应像素点(x,y)的灰度值,D(f)为图像清晰度计算结果(下同)。

C++源码:
/**
* Brenner梯度方法
*
* Inputs:
* @param image:
* Return: double
*/
double brenner(cv::Mat &image)
{
assert(image.empty());
cv::Mat gray_img;
if (image.channels() == 3){
cv::cvtColor(image, gray_img, CV_BGR2GRAY);
}
double result = .0f;
for (int i = 0; i < gray_img.rows; ++i){
uchar *data = gray_img.ptr<uchar>(i);
for (int j = 0; j < gray_img.cols - 2; ++j){
result += pow(data[j + 2] - data[j], 2);
}
}
return result/gray_img.total();
}
2. Tenengrad 梯度函数
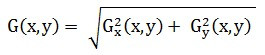
Tenengrad 梯度函数采用Sobel算子分别提取水平和垂直方向的梯度值,基与Tenengrad 梯度函数的图像清晰度定义如下:
G(x,y) 的形式如下:
其中:T是给定的边缘检测阈值,Gx和Gy分别是像素点(x,y)处Sobel水平和垂直方向边缘检测算子的卷积,建议使用以下的Sobel算子模板来检测边缘:
C++源码:


/**
* Tenengrad梯度方法
*
* Inputs:
* @param image:
* Return: double
*/
double tenengard(cv::Mat &image)
{
assert(image.empty());
cv::Mat gray_img, sobel_x, sobel_y, G;
if (image.channels() == 3){
cv::cvtColor(image, gray_img,CV_BGR2GRAY);
}
//分别计算x/y方向梯度
cv::Sobel(gray_img, sobel_x, CV_32FC1, 1, 0);
cv::Sobel(gray_img, sobel_y, CV_32FC1, 0, 1);
cv::multiply(sobel_x, sobel_x, sobel_x);
cv::multiply(sobel_y, sobel_y, sobel_y);
cv::Mat sqrt_mat = sobel_x + sobel_y;
cv::sqrt(sqrt_mat, G);
return cv::mean(G)[0];
}
3. Laplacian 梯度函数
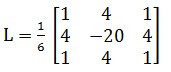
Laplacian 梯度函数与Tenengrad梯度函数基本一致,用Laplacian算子替代Sobel算子即可,该算子定义如下:
因此基于Laplacian 梯度函数的图像星清晰度的定义如下:
其中G(x,y)是像素点(x,y)处Laplacian算子的卷积。

C++源码:
/**
* Laplacian 梯度函数
*
* Inputs:
* @param image:
* Return: double
*/
double laplacian(cv::Mat &image)
{
assert(image.empty());
cv::Mat gray_img, lap_image;
if (image.channels() == 3){
cv::cvtColor(image, gray_img, CV_BGR2GRAY);
}
cv::Laplacian(gray_img, lap_image, CV_32FC1);
lap_image=cv::abs(lap_image);
return cv::mean(lap_image)[0];
}
4. SMD(灰度方差)函数
当完全聚焦时,图像最清晰,图像中的高频分量也最多,故可将灰度变化作为聚焦评价的依据,灰度方差法的公式如下:
C++ 源码:

/**
* SMD(灰度方差)函数
*
* Inputs:
* @param image:
* Return: double
*/
double smd(cv::Mat &image)
{
assert(image.empty());
cv::Mat gray_img, smd_image_x, smd_image_y, G;
if (image.channels() == 3){
cv::cvtColor(image, gray_img, CV_BGR2GRAY);
}
cv::Mat kernel_x(3, 3, CV_32F, cv::Scalar(0));
kernel_x.at<float>(1, 2) = -1.0;
kernel_x.at<float>(1, 1) = 1.0;
cv::Mat kernel_y(3, 3, CV_32F, cv::Scalar(0));
kernel_y.at<float>(0, 1) = -1.0;
kernel_y.at<float>(1, 1) = 1.0;
cv::filter2D(gray_img, smd_image_x, gray_img.depth(), kernel_x);
cv::filter2D(gray_img, smd_image_y, gray_img.depth(), kernel_y);
smd_image_x = cv::abs(smd_image_x);
smd_image_y = cv::abs(smd_image_y);
G = smd_image_x + smd_image_y;
return cv::mean(G)[0];
}
5. SMD2 (灰度方差乘积)函数
灰度差分评价函数具有较好的计算性能,但其缺点也很明显,即在焦点附近灵敏度不高,即该函数在极值点附近过于平坦,从而导致聚焦精度难以提高。在文章《一种快速高灵敏度聚焦评价函数》中提出了一种新的评价函数,称之为灰度方差乘积法,即对每一个像素领域两个灰度差相乘后再逐个像素累加,该函数定义如下:

/**
* SMD2 (灰度方差乘积)函数
*
* Inputs:
* @param image:
* Return: double
*/
double smd2(cv::Mat &image)
{
assert(image.empty());
cv::Mat gray_img, smd_image_x, smd_image_y, G;
if (image.channels() == 3){
cv::cvtColor(image, gray_img, CV_BGR2GRAY);
}
cv::Mat kernel_x(3, 3, CV_32F, cv::Scalar(0));
kernel_x.at<float>(1, 2) = -1.0;
kernel_x.at<float>(1, 1) = 1.0;
cv::Mat kernel_y(3, 3, CV_32F, cv::Scalar(0));
kernel_y.at<float>(1, 1) = 1.0;
kernel_y.at<float>(2, 1) = -1.0;
cv::filter2D(gray_img, smd_image_x, gray_img.depth(), kernel_x);
cv::filter2D(gray_img, smd_image_y, gray_img.depth(), kernel_y);
smd_image_x = cv::abs(smd_image_x);
smd_image_y = cv::abs(smd_image_y);
cv::multiply(smd_image_x, smd_image_y, G);
return cv::mean(G)[0];
}
6. 能量梯度函数
能量梯度函数更适合实时评价图像清晰度,该函数定义如下:
C++源码:

/**
* 能量梯度函数
*
* Inputs:
* @param image:
* Return: double
*/
double energy_gradient(cv::Mat &image)
{
assert(image.empty());
cv::Mat gray_img, smd_image_x, smd_image_y, G;
if (image.channels() == 3){
cv::cvtColor(image, gray_img, CV_BGR2GRAY);
}
cv::Mat kernel_x(3, 3, CV_32F, cv::Scalar(0));
kernel_x.at<float>(1, 2) = -1.0;
kernel_x.at<float>(1, 1) = 1.0;
cv::Mat kernel_y(3, 3, CV_32F, cv::Scalar(0));
kernel_y.at<float>(1, 1) = 1.0;
kernel_y.at<float>(2, 1) = -1.0;
cv::filter2D(gray_img, smd_image_x, gray_img.depth(), kernel_x);
cv::filter2D(gray_img, smd_image_y, gray_img.depth(), kernel_y);
cv::multiply(smd_image_x, smd_image_x, smd_image_x);
cv::multiply(smd_image_y, smd_image_y, smd_image_y);
G = smd_image_x + smd_image_y;
return cv::mean(G)[0];
}
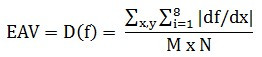
7. EAV点锐度算法函数
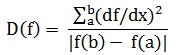
徐贵力、张霞等提出了一种基于边缘锐度的算法用于评价图像的清晰度。通过统计图像某一边缘方向的灰度变化情况来评价。计算公式如下:
其中:df/dx为边缘法向的灰度变化率,f(b) - f(a)为该方向的总体灰度变化。该算法只对图像的特定边缘区域做统计,能否代表整幅图像的清晰度仍有疑问,此外计算前需人工选定边缘区域,不便实现程序运算的自动化,因为王鸿南等在论文 图像清晰度评价方法研究 中对上述算法进行了改进,改进如下:
- 将针对边缘的梯度计算改为逐个像素领域梯度的计算,以便算法能对图像的整体进行评价,并使算法实现自动化。
- 对方格像素 8 领域的灰度变化进行距离加权,水平和垂直方向的权重为1,而45度和135度方向的权重为 。
- 对计算结果按图像的大小进行规格化,以便于图像的对比。
经过以上三步改进后的点锐度算法为:
其中:M和N为图像的行数和列数。
C++源码:
/**
* EAV点锐度算法函数
*
* Inputs:
* @param image:
* Return: double
*/
double eav(cv::Mat &image)
{
assert(image.empty());
cv::Mat gray_img, smd_image_x, smd_image_y, G;
if (image.channels() == 3){
cv::cvtColor(image, gray_img, CV_BGR2GRAY);
}
double result = .0f;
for (int i = 1; i < gray_img.rows-1; ++i){
uchar *prev = gray_img.ptr<uchar>(i - 1);
uchar *cur = gray_img.ptr<uchar>(i);
uchar *next = gray_img.ptr<uchar>(i + 1);
for (int j = 0; j < gray_img.cols; ++j){
result += (abs(prev[j - 1] - cur[i])*0.7 + abs(prev[j] - cur[j]) + abs(prev[j + 1] - cur[j])*0.7 +
abs(next[j - 1] - cur[j])*0.7 + abs(next[j] - cur[j]) + abs(next[j + 1] - cur[j])*0.7 +
abs(cur[j - 1] - cur[j]) + abs(cur[j + 1] - cur[j]));
}
}
return result / gray_img.total();
}
8. NRSS 梯度结构相似度
计算过程如下:

C++源码:
/**
* 误差灵敏度分析和结构相似度分析
*
* Inputs:
* @param i1:
* @param i2:
* Return: double
*/
double ssim(cv::Mat &i1, cv::Mat & i2)
{
const double C1 = 6.5025, C2 = 58.5225;
int d = CV_32F;
cv::Mat I1, I2;
i1.convertTo(I1, d);
i2.convertTo(I2, d);
cv::Mat I1_2 = I1.mul(I1);
cv::Mat I2_2 = I2.mul(I2);
cv::Mat I1_I2 = I1.mul(I2);
cv::Mat mu1, mu2;
GaussianBlur(I1, mu1, cv::Size(11, 11), 1.5);
GaussianBlur(I2, mu2, cv::Size(11, 11), 1.5);
cv::Mat mu1_2 = mu1.mul(mu1);
cv::Mat mu2_2 = mu2.mul(mu2);
cv::Mat mu1_mu2 = mu1.mul(mu2);
cv::Mat sigma1_2, sigam2_2, sigam12;
GaussianBlur(I1_2, sigma1_2, cv::Size(11, 11), 1.5);
sigma1_2 -= mu1_2;
GaussianBlur(I2_2, sigam2_2, cv::Size(11, 11), 1.5);
sigam2_2 -= mu2_2;
GaussianBlur(I1_I2, sigam12, cv::Size(11, 11), 1.5);
sigam12 -= mu1_mu2;
cv::Mat t1, t2, t3;
t1 = 2 * mu1_mu2 + C1;
t2 = 2 * sigam12 + C2;
t3 = t1.mul(t2);
t1 = mu1_2 + mu2_2 + C1;
t2 = sigma1_2 + sigam2_2 + C2;
t1 = t1.mul(t2);
cv::Mat ssim_map;
divide(t3, t1, ssim_map);
cv::Scalar mssim = cv::mean(ssim_map);
double ssim = (mssim.val[0] + mssim.val[1] + mssim.val[2]) / 3;
return ssim;
}
/**
* NRSS梯度结构相似度
*
* Inputs:
* @param image:
* Return: double
*/
double nrss(cv::Mat &image)
{
assert(image.empty());
cv::Mat gray_img, Ir, G, Gr;
if (image.channels() == 3){
cv::cvtColor(image, gray_img, CV_BGR2GRAY);
}
//构造参考图像
cv::GaussianBlur(gray_img, Ir, cv::Size(7, 7), 6, 6);
//提取图像和参考图像的梯度信息
cv::Sobel(gray_img, G, CV_32FC1, 1, 1);//计算原始图像sobel梯度
cv::Sobel(Ir, Gr, CV_32FC1, 1, 1);//计算构造函数的sobel梯度
//找出梯度图像 G 中梯度信息最丰富的 N 个图像块,n=64(即划分为8x8的大小)
//计算每个小方块的宽/高
int block_cols = G.cols * 2 / 9;
int block_rows = G.rows * 2 / 9;
//获取方差最大的block
cv::Mat best_G,best_Gr;
float max_stddev = .0f;
int pos = 0;
for (int i = 0; i < 64; ++i){
int left_x = (i % 8)*(block_cols / 2);
int left_y = (i / 8)*(block_rows / 2);
int right_x = left_x + block_cols;
int right_y = left_y + block_rows;
if (left_x < 0) left_x = 0;
if (left_y < 0) left_y = 0;
if (right_x >= G.cols) right_x = G.cols - 1;
if (right_y >= G.rows) right_y = G.rows - 1;
cv::Rect roi(left_x,left_y,right_x-left_x,right_y-left_y);
cv::Mat temp=G(roi).clone();
cv::Scalar mean,stddev;
cv::meanStdDev(temp, mean, stddev);
if (stddev.val[0]>max_stddev){
max_stddev = static_cast<float>(stddev.val[0]);
pos = i;
best_G = temp;
best_Gr = Gr(roi).clone();
}
}
//计算结构清晰度NRSS
double result = 1 - ssim(best_G, best_Gr);
return result;
}
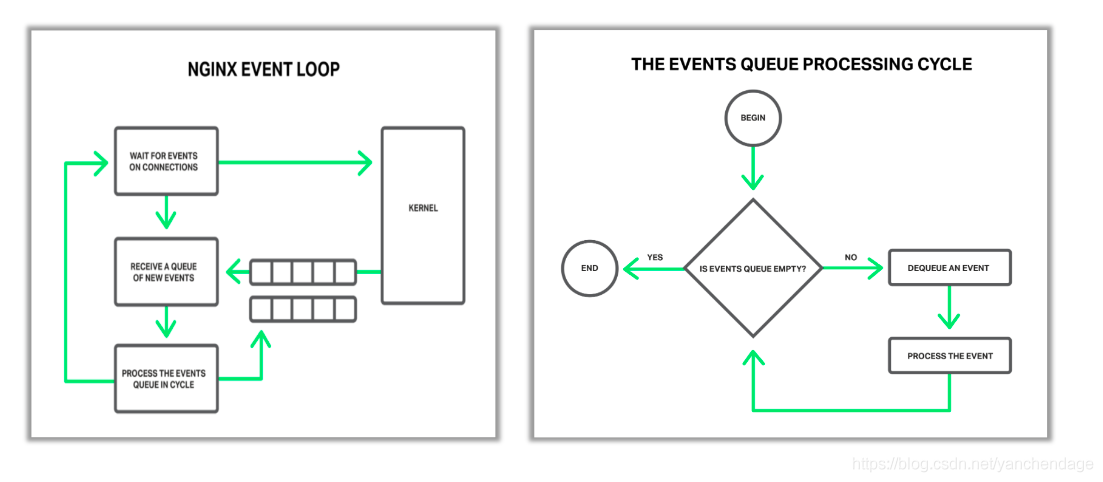
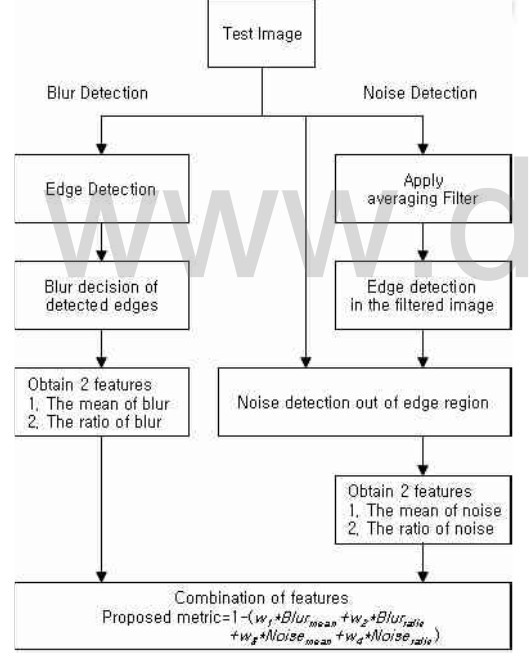
9. No-Reference Image Quality Assessment using Blur and Noise
图像质量受很多因素影响,例如:亮度、对比度、色调、边界、噪声、模糊等。在本文中,我们假定噪声和模糊是影响图像质量最重要的两个因素。简单起见,只对彩色图像的亮度分量做模糊和噪声监测。本文的图像质量评价算法框架图如下:
C++源码:
/**
* 模糊检测
*
* Inputs:
* @param gray_img:
* @param blur_mean:
* @param blur_ratio:
* Return: void
*/
void comput_blur_IQA(cv::Mat &src, float &blur_mean, float &blur_ratio)
{
cv::Mat gray_img = src.clone();
//计算水平/竖直差值获取梯度图
cv::Mat grad_h, grad_v;
cv::Mat kernel_h = cv::Mat::zeros(cv::Size(3, 3), CV_32FC1);
kernel_h.at<float>(0, 1) = -1;
kernel_h.at<float>(2, 1) = 1;
cv::filter2D(gray_img, grad_h, CV_32FC1, kernel_h);
cv::Mat kernel_v = cv::Mat::zeros(cv::Size(3, 3), CV_32FC1);
kernel_v.at<float>(1, 0) = -1;
kernel_v.at<float>(1, 2) = 1;
cv::filter2D(gray_img, grad_v, CV_32FC1, kernel_v);
//获取候选边缘点
//筛选条件:D_h > D_mean
float mean = static_cast<float>(cv::mean(grad_v)[0]);
cv::Mat mask = grad_h > mean;
mask = mask / 255;
mask.convertTo(mask, CV_32FC1);
cv::Mat C_h;
cv::multiply(grad_h, mask, C_h);
//进一步筛选边缘点
//筛选条件:C_h(x,y) > C_h(x,y-1) and C_h(x,y) > C_h(x,y+1)
cv::Mat edge = cv::Mat::zeros(C_h.rows, C_h.cols, CV_8UC1);
for (int i = 1; i < C_h.rows-1; ++i){
float *prev = C_h.ptr<float>(i - 1);
float *cur = C_h.ptr<float>(i);
float *next = C_h.ptr<float>(i + 1);
uchar *data = edge.ptr<uchar>(i);
for (int j = 0; j < C_h.cols; ++j){
if (prev[j] < cur[j] && next[j] < cur[j]){
data[j] = 1;
}
}
}
//检测边缘点是否模糊
//获取inverse blur
cv::Mat A_h = grad_h / 2;
cv::Mat BR_h=cv::Mat(gray_img.size(),CV_32FC1);
gray_img.convertTo(gray_img, CV_32FC1);
cv::absdiff(gray_img, A_h, BR_h);
cv::divide(BR_h, A_h, BR_h);
cv::Mat A_v = grad_v / 2;
cv::Mat BR_v;
cv::absdiff(gray_img, A_v, BR_v);
cv::divide(BR_v, A_v, BR_v);
cv::Mat inv_blur = cv::Mat::zeros(BR_v.rows, BR_v.cols, CV_32FC1);
for (int i = 0; i < inv_blur.rows; ++i){
float *data_v = BR_v.ptr<float>(i);
float *data = inv_blur.ptr<float>(i);
float *data_h = BR_h.ptr<float>(i);
for (int j = 0; j < inv_blur.cols; ++j){
data[j] = data_v[j]>data_h[j] ? data_v[j] : data_h[j];
}
}
//获取最终模糊点
cv::Mat blur = inv_blur < 0.1 / 255;
blur.convertTo(blur, CV_32FC1);
//计算边缘模糊的均值和比例
int sum_inv_blur = cv::countNonZero(inv_blur);
int sum_blur = cv::countNonZero(blur);
int sum_edge = cv::countNonZero(edge);
blur_mean = static_cast<float>(sum_inv_blur) / sum_blur;
blur_ratio = static_cast<float>(sum_blur) / sum_edge;
}
/**
* 噪点检测
*
* Inputs:
* @param gray_img:
* @param noise_mean:
* @param noise_ratio:
* Return: void
*/
void compute_noise_IQA(cv::Mat &gray_img, float &noise_mean, float &noise_ratio)
{
//均值滤波去除噪声对边缘检测的影响
cv::Mat blur_img;
cv::blur(gray_img, blur_img, cv::Size(3, 3));
//进行竖直方向边缘检测
cv::Mat grad_h, grad_v;
cv::Mat kernel_h = cv::Mat::zeros(cv::Size(3, 3), CV_32FC1);
kernel_h.at<float>(0, 1) = -1;
kernel_h.at<float>(2, 1) = 1;
cv::filter2D(gray_img, grad_h, CV_32FC1, kernel_h);
cv::Mat kernel_v = cv::Mat::zeros(cv::Size(3, 3), CV_32FC1);
kernel_v.at<float>(1, 0) = -1;
kernel_v.at<float>(1, 2) = 1;
cv::filter2D(gray_img, grad_v, CV_32FC1, kernel_v);
//筛选候选点
//水平/竖直梯度的均值
float D_h_mean = .0f, D_v_mean = .0f;
D_h_mean = static_cast<float>(cv::mean(grad_h)[0]);
D_v_mean = static_cast<float>(cv::mean(grad_v)[0]);
//获取候选噪声点
cv::Mat N_cand = cv::Mat::zeros(gray_img.rows, gray_img.cols, CV_32FC1);
for (int i = 0; i < gray_img.rows; ++i){
float *data_h = grad_h.ptr<float>(i);
float *data_v = grad_v.ptr<float>(i);
float *data = N_cand.ptr<float>(i);
for (int j = 0; j < gray_img.cols; ++j){
if (data_v[j] < D_v_mean && data_h[j] < D_h_mean){
data[j] = data_v[j]>data_h[j] ? data_v[j] : data_h[j];
}
}
}
//最终的噪声点
float N_cand_mean = static_cast<float>(cv::mean(N_cand)[0]);
cv::Mat mask = (N_cand>N_cand_mean)/255;
mask.convertTo(mask, CV_32FC1);
cv::Mat N;
cv::multiply(N_cand, mask, N);
//计算噪声的均值和比率
float sum_noise = static_cast<float>(cv::sum(N)[0]);
int sum_noise_cnt = cv::countNonZero(N);
noise_mean = sum_noise / (sum_noise_cnt + 0.0001);
noise_ratio = static_cast<float>(sum_noise_cnt) / N.total();
}
/**
* 对模糊和噪声进行无参考图像质量评估
*
* Inputs:
* @param image:
* Return: double
*/
double blur_noise_IQA(cv::Mat &image)
{
assert(image.empty());
cv::Mat gray_img=cv::Mat(image.size(),CV_8UC1);
if (image.channels() == 3){
cv::cvtColor(image, gray_img, CV_BGR2GRAY);
}
//1、模糊检测
float blur_mean = 0.f, blur_ratio = 0.f;
comput_blur_IQA(gray_img, blur_mean, blur_ratio);
//2、噪声点检测
float noise_mean = 0.f, noise_ratio = 0.f;
compute_noise_IQA(gray_img, noise_mean, noise_ratio);
//3、噪声和模糊的组合
double result = 1 - (blur_mean + 0.95*blur_ratio + 0.3*noise_mean + 0.75*noise_ratio);
return result;
}