在数据处理与应用的过程中,我们难免会遇到一些低质量的遥感数据,低质量遥感数据一般是由于天气因素导致的,在云量较多时,卫星传感器所采集到的地面信息被云层所遮挡,导致遥感图像成像过程中产生了较多噪声,对遥感数据的精确度造成了一定影响,如果不解决这些数据中的噪声,会导致我们从遥感数据中所提取到的信息也不够精确。
为更好的处理遥感数据中的噪声,我们一般会使用均值滤波或中值滤波对遥感图像进行去噪,去除遥感图像噪声的目的在于最大程度上还原原始数据,以便于我们更好的提取遥感图像中的有效信息。
那么,在进行滤波代码的实现以前,让我们一起来看一下滤波的实现原理吧!
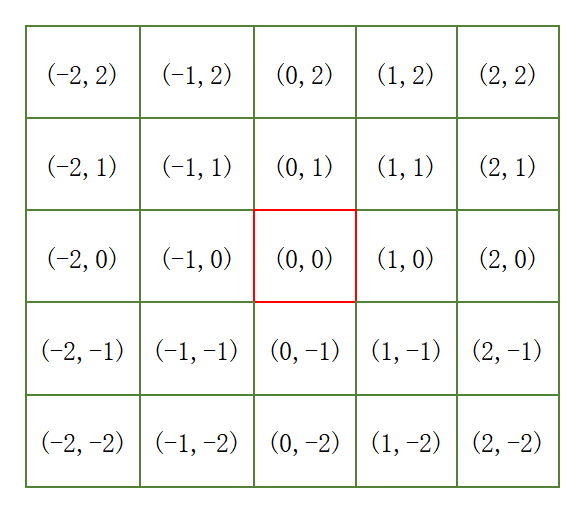
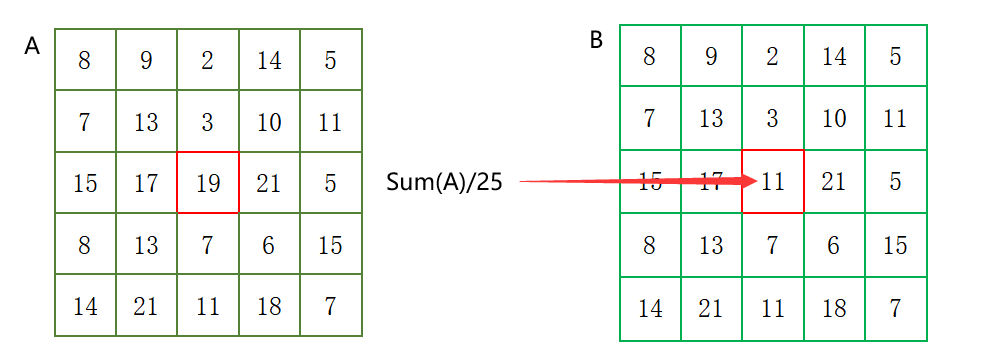
其中,滤波算法的主要思路为,设置一个n*n(n=2x+1,x>0)大小的窗口,随后对这个窗口的中心点像元进行重新赋值,以5*5的窗口以及均值滤波算法为例,在上图中,窗口A的中心像元(0,0)的值为19,而经过了均值滤波后,也就是在窗口B中,原窗口A的中心像元(0,0)的值变成了11,而这个值,是由原窗口A中所有像元的值加起来的总和除以25得到的。
通过上述算法,即可对一个窗口内的遥感数据进行滤波,基于上述思路,对整个遥感图像进行遍历,以窗口的中心像元为基准&


