本文展示了在微型飞行器(MAV)上收集的视觉惯性数据集。数据集包含立体图像、同步 IMU 测量以及精确的运动和结构地面实况。 这些数据集发表于:M. Burri,J. Nikolic,P. Gohl,T. Schneider,J. Rehder,S. Omari,M. Achtelik和R. Siegwart,EuRoC微型飞行器数据集,国际机器人研究杂志,DOI:10.1177 / 0278364915620033,2016年初。
EuRoC MAV 数据集
- 一、可用数据
- 二、下载
- 三、平台和传感器
- 四、真实情况
- 仪器
- 时空对齐
- 五、已知问题
一、可用数据
-
视觉惯性传感器单元
- 立体图像(Aptina MT9V034全局快门,WVGA单色,2×20 FPS)
- MEMS IMU(ADIS16448,角速率和加速度,200 Hz)
- 以快门为中心的时间对齐
-
地面真相
- Vicon动作捕捉系统(6D位姿)
- Leica MS50激光跟踪仪(3D位姿)
- Leica MS50三维结构扫描
-
校准
- 相机内参
- 摄像头-IMU外参
- 时空对齐的真实情况
二、下载
mav数据集下载,下面列出EuRoC官网的mav数据集,MH01给出了下载链接。
| Dataset | ROS bag | ASL Dataset Format | Comment |
|---|---|---|---|
| Machine Hall 01 | bag | zip | Dataset machine hall “easy” |
| Machine Hall 02 | bag | zip | Dataset machine hall “easy” |
| Machine Hall 03 | bag | zip | Dataset machine hall “medium” |
| Machine Hall 04 | bag | zip | Dataset machine hall “difficult” |
| Machine Hall 05 | bag | zip | Dataset machine hall “difficult” |
| Vicon Room 1 01 | bag | zip | Dataset Vicon room 1 “easy” |
| Vicon Room 1 02 | bag | zip | Dataset Vicon room 1 “medium” |
| Vicon Room 1 03 | bag | zip | Dataset Vicon room 1 “difficult” |
| Vicon Room 2 01 | bag | zip | Dataset Vicon room 2 “easy” |
| Vicon Room 2 02 | bag | zip | Dataset Vicon room 2 “medium” |
| Vicon Room 2 03 | bag | zip | Dataset Vicon room 2 “difficult” |
| Calibration Dataset | bag | zip | Dataset for custom calibration |
校准所有外参和内在校准参数以及后处理的真实情况都包含在上面的下载中(ASL 数据集格式)。
数据集解析器此处提供了一个简单的数据集解析器:dataset_tools。如果您使用 ROS 并且无法处理大量数据,您可以找到一个 python 脚本,该脚本将正确的标头时间戳重新分配给 bag 文件。
数据有两批数据集可用。第一批记录在ETH机房(见图1),其中包含来自Leica MS50激光跟踪仪的毫米级精确位置真实情况。第二批包含Vicon 6D姿势真实情况和精确的环境3D扫描(见图2)。


三、平台和传感器
下图的Asctec Firefly六旋翼直升机用于数据集收集,携带视觉惯性(相机IMU)传感器单元。
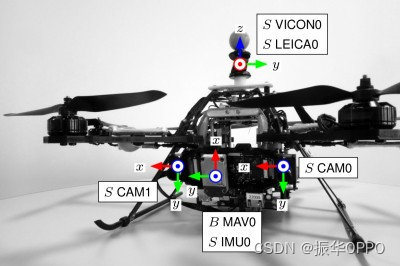
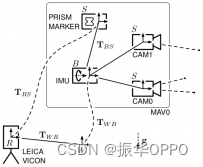
下图左:视觉惯性传感器单元(由直升机携带);右:传感器和地面实况仪器示意图。

四、真实情况
仪器
以下设备用于捕获6D运动和结构地面实况
- Leica MS50激光跟踪仪和扫描仪
- Vicon 6D动作捕捉系统。
时空对齐
传感器和真实数据经过外部校准,并在时间上对齐。
五、已知问题
-
视觉惯性传感器采用独立于两个相机的自动曝光控制。这导致了不同的快门时间,进而导致不同的图像亮度,使立体匹配和特征跟踪更具挑战性。由于两个相机的中间曝光时间在时间上是对齐的,因此同步不受不同快门时间的影响。
-
一些数据集表现出非常动态的运动,已知这会降低激光跟踪设备的测量精度。制造商报告的数字可能对这些事件过于乐观,这使得对高精度视觉测程法方法的地面实况比较的解释变得复杂。假设对动态运动较少的部分(尤其是每个数据集的开始和结束)的影响可以忽略不计。
-
传感器数据和运动地面实况之间同步的准确性受到以下事实的限制:两个源都记录在不同的系统上,并且设备时间戳不适用于 Vicon 系统。通过将时间偏移∆t S估计为一种状态,可以缓解此问题,同时解决固定的时间偏移和时钟漂移问题。在可用的情况下,使用设备时间戳来避免抖动。原始数据可用于评估替代同步方案。