Python-OpenCV中的图像处理-图像平滑
- 图像平滑
- 平均滤波
- 高斯模糊
- 中值模糊
- 双边滤波
图像平滑
使用低通滤波器可以达到图像模糊的目的。这对与去除噪音很有帮助。其实就是去除图像中的高频成分(比如:噪音,边界)。所以边界也会被模糊一点。(当然,也有一些模糊技术不会模糊掉边界)。
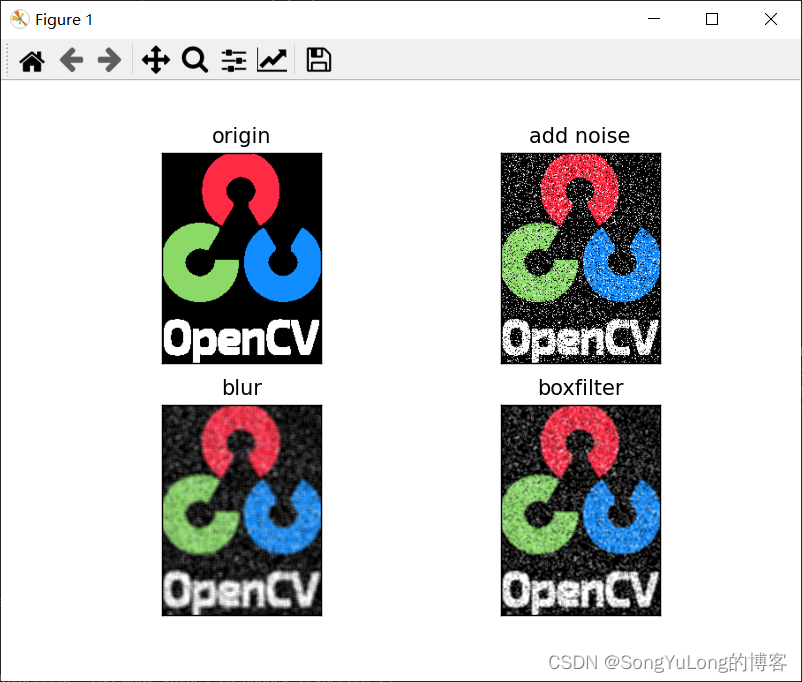
平均滤波
这是由一个归一化卷积框完成的。他只是用卷积框覆盖区域所有像素的平均值来代替中心元素。可以使用函数 cv2.blur() 和 cv2.boxFilter() 来完这个任务。可以同看查看文档了解更多卷积框的细节。我们需要设定卷积框的宽和高。
一个3x3的归一化卷积框:
K
=
1
9
[
1
1
1
1
1
1
1
1
1
]
K=\frac{1}{9}\left[\begin{matrix} 1&1&1 \\1&1&1\\1&1&1\end{matrix}\right]
K=91
111111111
注意:如果不想使用归一化卷积框,你应该使用 cv2.boxFilter(),这时要传入参数 normalize=False。
dst=cv2.boxFilter(src,ddepth,ksize)
python">import numpy as np
import cv2
from matplotlib import pyplot as plt
# 在图片上生成椒盐噪声
def add_peppersalt_noise(image, n=10000):
result = image.copy()
# 测量图片的长和宽
w, h, = image.shape[:2]
# 生成n个椒盐噪声
for i in range(n):
x = np.random.randint(1, w)
y= np.random.randint(1, h)
if np.random.randint(0, 2) == 0 :
result[x, y] = 0
else:
result[x,y] = 255
return result
# 平均
# 这是由一个归一化卷积框完成的,
# cv2.blur()和cv2.boxFiter()来实现。
img = cv2.imread('./resource/opencv/image/logo/opencv-logo-white.png', cv2.IMREAD_COLOR)
# 原图添加椒盐噪声
saltnoise_img = add_peppersalt_noise(img, 10000)
blur = cv2.blur(saltnoise_img, (5,5))
boxfilter = cv2.boxFilter(saltnoise_img, -1, (3,3))
# boxfilter = cv2.boxFilter(saltnoise_img, -1, (3,3), normalize=0)
plt.subplot(221), plt.imshow(cv2.cvtColor(img, cv2.COLOR_BGR2RGB)), plt.title('origin'), plt.xticks([]), plt.yticks([])
plt.subplot(222), plt.imshow(cv2.cvtColor(saltnoise_img, cv2.COLOR_BGR2RGB)), plt.title('add noise'), plt.xticks([]), plt.yticks([])
plt.subplot(223), plt.imshow(cv2.cvtColor(blur, cv2.COLOR_BGR2RGB)), plt.title('blur'), plt.xticks([]), plt.yticks([])
plt.subplot(224), plt.imshow(cv2.cvtColor(boxfilter, cv2.COLOR_BGR2RGB)), plt.title('boxfilter'), plt.xticks([]), plt.yticks([])
plt.show()
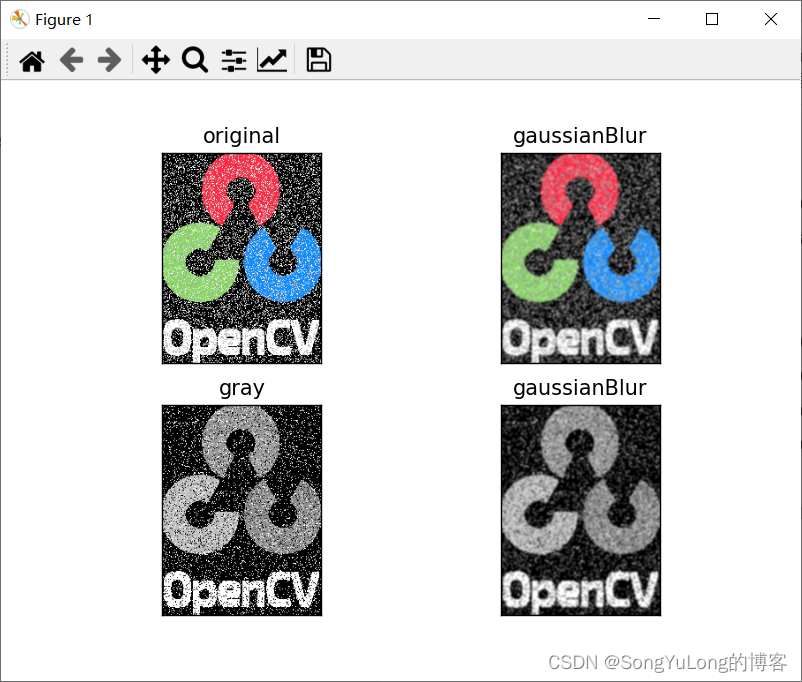
高斯模糊
现在把卷积核换成高斯核(简单来说,方框不变,将原来每个方框的值是相等的,现在里面的值是符合高斯分布的,方框中心的值最大,其余方框根据距离中心元素的距离递减,构成一个高斯小山包。原来的求平均数现在变成求加权平均数,全就是方框里的值)。实现的函数是 cv2.GaussianBlur()。我们需要指定高斯核的宽和高(必须是奇数)。以及高斯函数沿 X, Y 方向的标准差。如果我们只指定了 X 方向的的标准差, Y 方向也会取相同值。如果两个标准差都是 0,那么函数会根据核函数的大小自己计算。高斯滤波可以有效的从图像中去除高斯噪音。如果你愿意的话,你也可以使用函数 cv2.getGaussianKernel() 自己构建一个高斯核。
python">import numpy as np
import cv2
from matplotlib import pyplot as plt
# 高斯模糊
# 卷积核换成高斯核,即方框不变,将原来方框相等的值,换成符合高斯分部的值,方框中心值最大,其余值递减,构成一个高斯小山包
# 高斯核的宽和高必须是奇数
# 在图片上生成椒盐噪声
def add_peppersalt_noise(image, n=10000):
result = image.copy()
# 测量图片的长和宽
w, h, = image.shape[:2]
# 生成n个椒盐噪声
for i in range(n):
x = np.random.randint(1, w)
y= np.random.randint(1, h)
if np.random.randint(0, 2) == 0 :
result[x, y] = 0
else:
result[x,y] = 255
return result
# 获取高斯核
k1 = cv2.getGaussianKernel(3, 1)
k2 = cv2.getGaussianKernel(5,2)
print(k1)
print(k2)
# 彩色图像高斯模糊
img = cv2.imread('./resource/opencv/image/logo/opencv-logo-white.png', cv2.IMREAD_COLOR)
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGBA)
img = add_peppersalt_noise(img)
dst1 = cv2.GaussianBlur(img, (5,5), 0)
# 灰度图像高斯模糊
gray = cv2.imread('./resource/opencv/image/logo/opencv-logo-white.png', cv2.IMREAD_GRAYSCALE)
gray = add_peppersalt_noise(gray)
dst2 = cv2.GaussianBlur(gray, (5,5), 0)
plt.subplot(221), plt.imshow(img, 'gray'), plt.title('original'), plt.xticks([]), plt.yticks([])
plt.subplot(222), plt.imshow(dst1, 'gray'), plt.title('gaussianBlur'), plt.xticks([]), plt.yticks([])
plt.subplot(223), plt.imshow(gray, 'gray'), plt.title('gray'), plt.xticks([]), plt.yticks([])
plt.subplot(224), plt.imshow(dst2, 'gray'), plt.title('gaussianBlur'), plt.xticks([]), plt.yticks([])
plt.show()
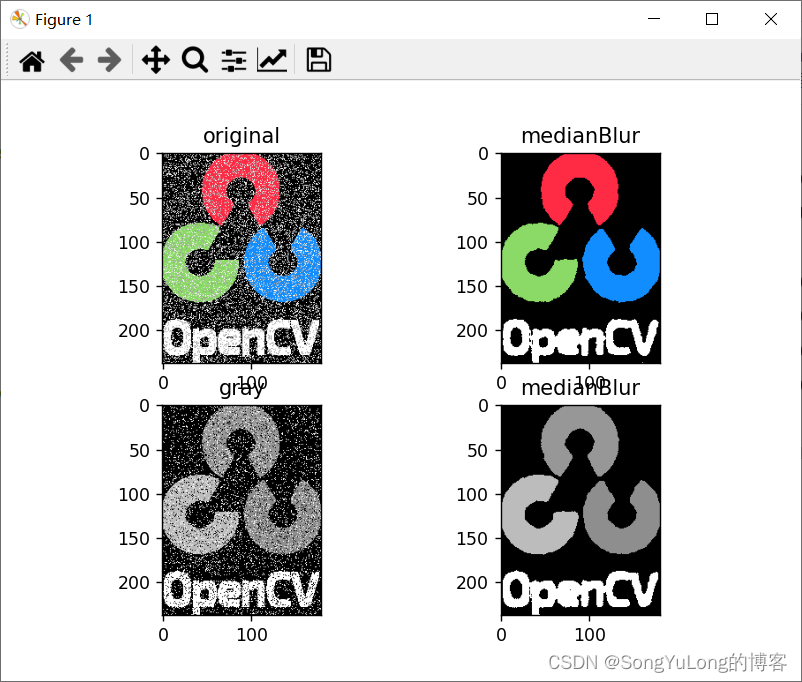
中值模糊
顾名思义就是用与卷积框对应像素的中值来替代中心像素的值。这个滤波器经常用来去除椒盐噪声。前面的滤波器都是用计算得到的一个新值来取代中心像素的值,而中值滤波是用中心像素周围(也可以使他本身)的值来取代他。他能有效的去除噪声。卷积核的大小也应该是一个奇数。
python">import numpy as np
import cv2
from matplotlib import pyplot as plt
# 中值滤波
# 在图片上生成椒盐噪声
def add_peppersalt_noise(image, n=10000):
result = image.copy()
# 测量图片的长和宽
w, h, = image.shape[:2]
# 生成n个椒盐噪声
for i in range(n):
x = np.random.randint(1, w)
y= np.random.randint(1, h)
if np.random.randint(0, 2) == 0 :
result[x, y] = 0
else:
result[x,y] = 255
return result
img = cv2.imread('./resource/opencv/image/logo/opencv-logo-white.png', cv2.IMREAD_COLOR)
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGBA)
img = add_peppersalt_noise(img)
median = cv2.medianBlur(img, 5)
gray = cv2.imread('./resource/opencv/image/logo/opencv-logo-white.png', cv2.IMREAD_GRAYSCALE)
gray = add_peppersalt_noise(gray)
median_gray = cv2.medianBlur(gray, 5)
plt.subplot(221), plt.imshow(img, 'gray'), plt.title('original')
plt.subplot(222), plt.imshow(median, 'gray'), plt.title('medianBlur')
plt.subplot(223), plt.imshow(gray, 'gray'), plt.title('gray')
plt.subplot(224), plt.imshow(median_gray, 'gray'), plt.title('medianBlur')
plt.show()
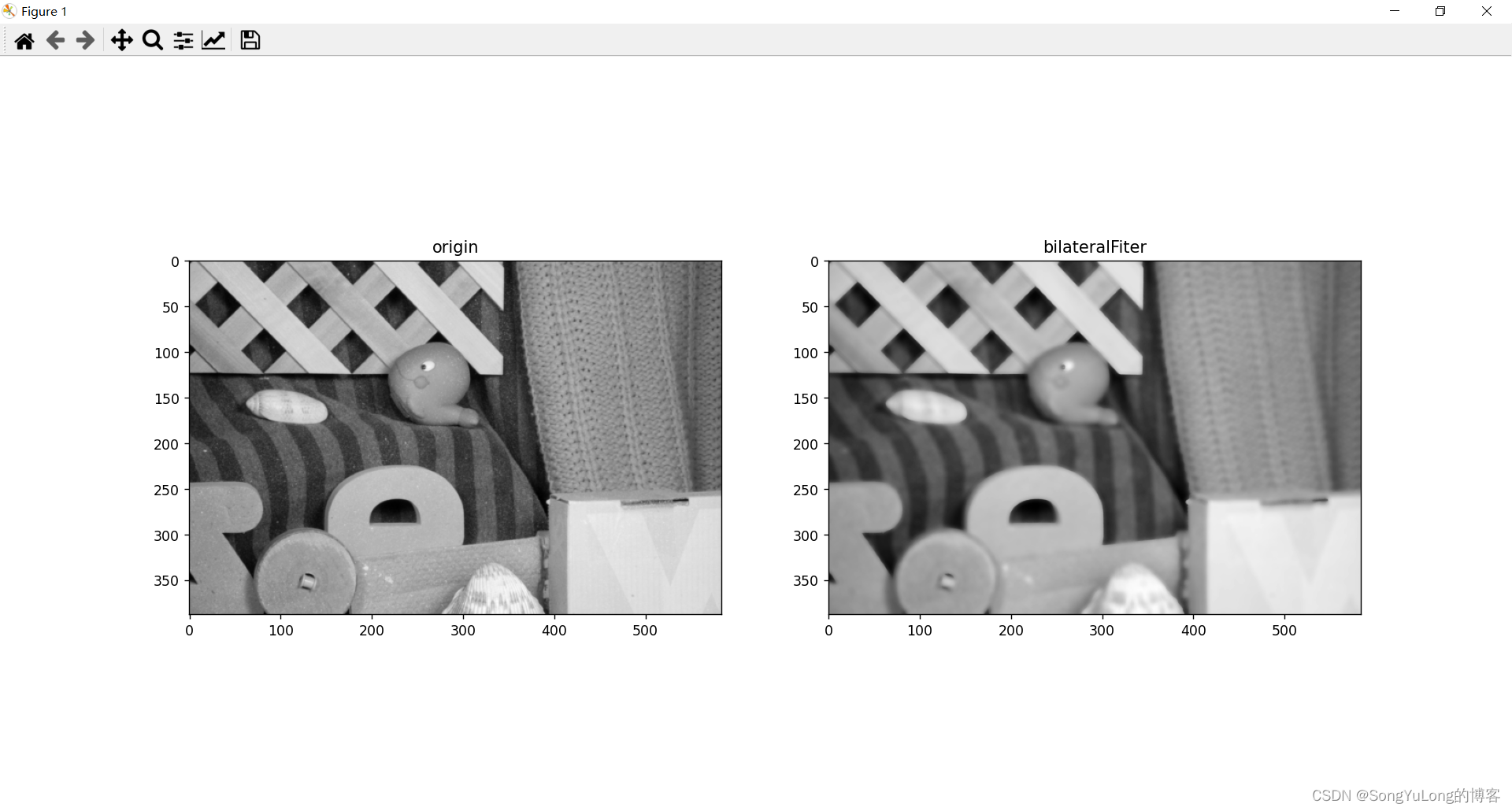
双边滤波
函数 cv2.bilateralFilter() 能在保持边界清晰的情况下有效的去除噪音。但是这种操作与其他滤波器相比会比较慢。我们已经知道高斯滤波器是求中心点邻近区域像素的高斯加权平均值。这种高斯滤波器只考虑像素之间的空间关系,而不会考虑像素值之间的关系(像素的相似度)。所以这种方法不会考虑一个像素是否位于边界。因此边界也会别模糊掉,而这正不是我们想要。双边滤波在同时使用空间高斯权重和灰度值相似性高斯权重。空间高斯函数确保只有邻近区域的像素对中心点有影响,灰度值相似性高斯函数确保只有与中心像素灰度值相近的才会被用来做模糊运算。所以这种方法会确保边界不会被模糊掉,因为边界处的灰度值变化比较大。
python">import numpy as np
import cv2
from matplotlib import pyplot as plt
# 双边滤波
img = cv2.imread('./resource/opencv/image/rubberwhale1.png', cv2.IMREAD_GRAYSCALE)
# 9:邻域直径,75:空间高斯函数标准差,75:灰度值相似性高斯函数标准差
dst1 = cv2.bilateralFilter(img, 9, 75, 75)
plt.subplot(121), plt.imshow(img, 'gray'), plt.title('origin')
plt.subplot(122), plt.imshow(dst1, 'gray'), plt.title('bilateralFiter')
plt.show()