SAP
学生管理系统
硬件面试
一元函数微分学
前缀和
智能家居
neo4j
龙蜥
软件测试工程师
程序员35
远程工作
网上书城
因果AI
链接
编程开发
Themida
软件工程师
集成开发环境
guava
IT冷知识
对极几何
2024/4/21 10:47:52
视觉里程计2(SLAM十四讲ch7)-对极几何,三角测量
对极几何 2D2D
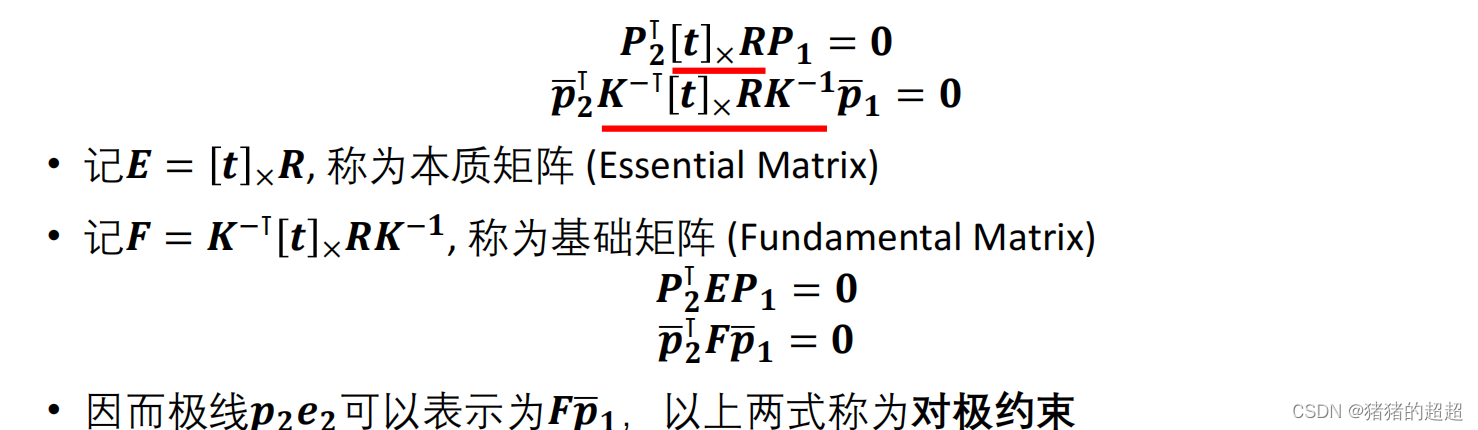
对极几何(Epipolar Geometry)是Structure from Motion问题中,在两个相机位置产生的两幅图像的之间存在的一种特殊几何关系,是sfm问题中2D-2D求解两帧间相机姿态的基本模型。
相机位姿估计问题——》
1.根据配对点…
Matlab 对极几何(Epipolar Geometry)
文章目录 一、简介1.1概述1.2本征矩阵与基本矩阵二、举个例子三、实现效果参考资料一、简介
1.1概述 在多视图获取同名点时,必不可少的一个过程就是使用对极几何进行其三维空间位置的求解。简单来讲,对极几何是两个视图之间的内在射影几何。它不依赖于场景结构,只依赖于相机…

计算机视觉基础(9)——相机标定与对极几何
前言 本节我们将学习相机标定和对极几何两部分的内容。 在相机标定部分,我们将学习直接线性变换(Direct Linear Transform, DL),张正友标定法(Zhang’s Method)和 Perspective-n-Point (PnP) 这三种方法。 在对极几何部…

《计算机双目立体视觉》学习笔记:对极几何
由双目立体视觉系统获得的来自同一场景的两幅图像之间存在着一定的约束关系,也就是说,当我们用两个相机在不同的位置拍摄同一个场景或者物体时,如果两张照片中的景物有重叠的部分,那么这两张照片之间就存在一定的对应关系…