mybatis
无穷级数
云计算
笔试题
节点度
Flink Sql
ux
全志
PMP
驱动程序
CubeMX
免责声明
熵
Nanoprobes
pat考试
小端
list
SimGNN
langchain
ReentrantLock
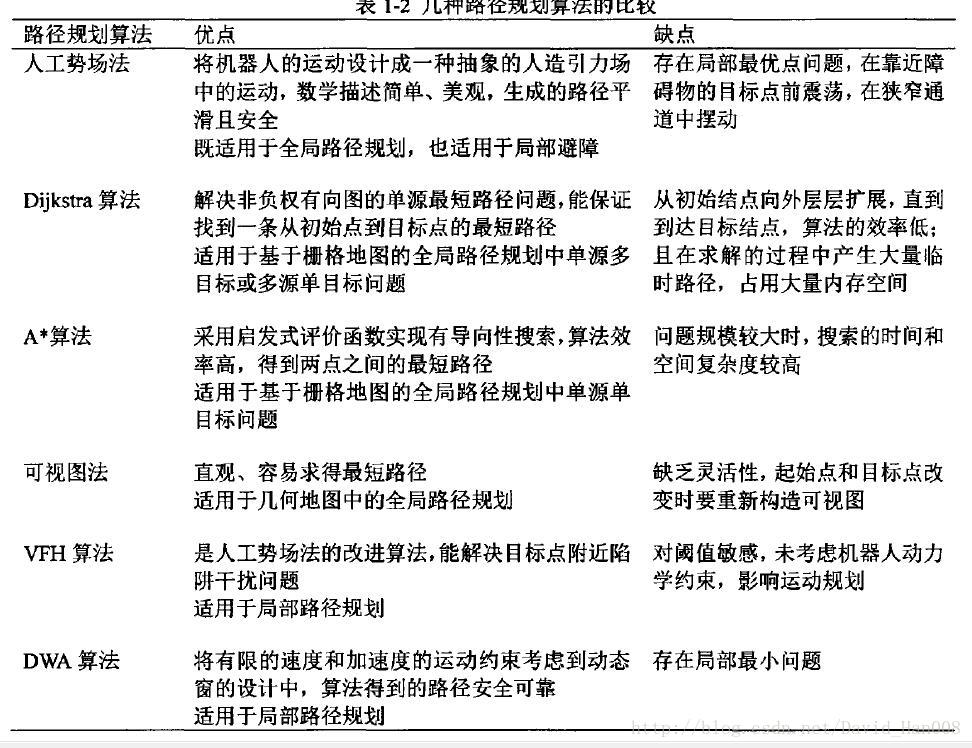
路径规划
2024/4/11 18:56:34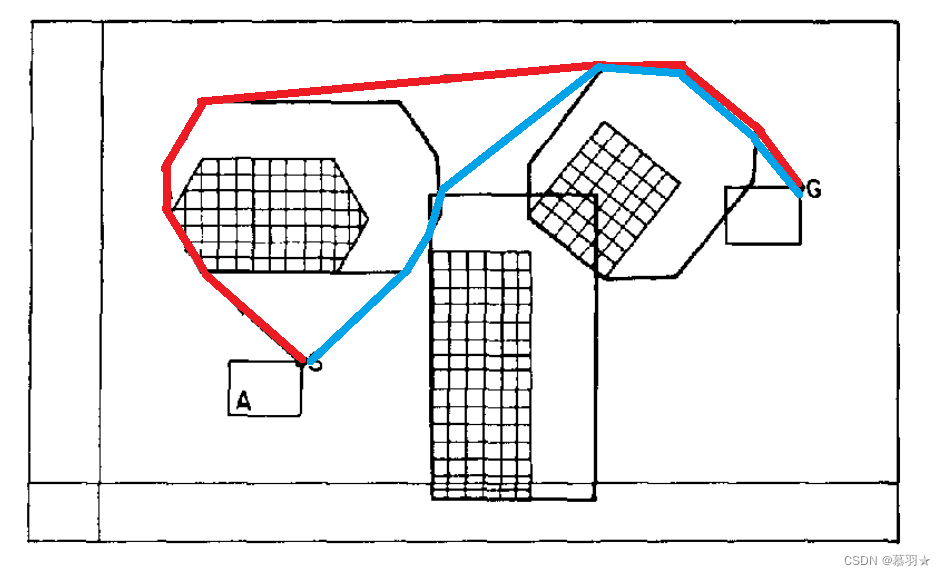
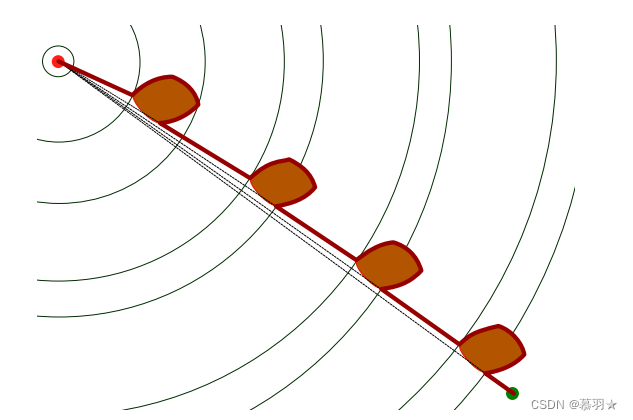
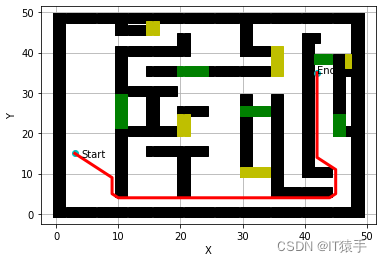
基于可视图法(VG)的路径规划算法简述
可视图法路径规划(VG) 可视图法由Lozano-Perez和Wesley于1979年在论文:《An Algorithm for Planning Collision-Free Paths among Polyhedral Obstacles.》中提出。 基于可视图法路径规划算法主要包括以下两个步骤:①可视图的构建…

ROS局部路径规划器插件teb_local_planner流程梳理(下)
在我之前的文章《ROS导航包Navigation中的 Movebase节点路径规划相关流程梳理》中已经介绍过Move_base节点调用局部路径规划器插件的接口函数是computeVelocityCommands,本部分来,我们从这个函数入手梳理teb_local_planner功能包的工作流程。 ☆注&#…
基于Qlearning强化学习的路径规划算法matlab仿真
目录
1.算法运行效果图预览
2.算法运行软件版本
3.部分核心程序
4.算法理论概述
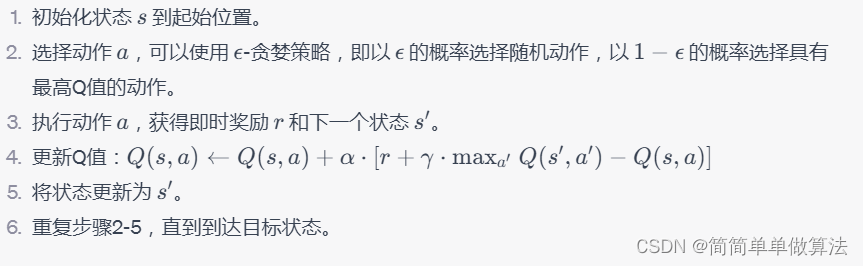
4.1 Q值更新规则
4.2 基于Q-learning的路径规划算法设计
4.3 Q-learning路径规划流程
5.算法完整程序工程 1.算法运行效果图预览 2.算法运行软件版本
MATLAB2022A
3.部分核心程序
..…
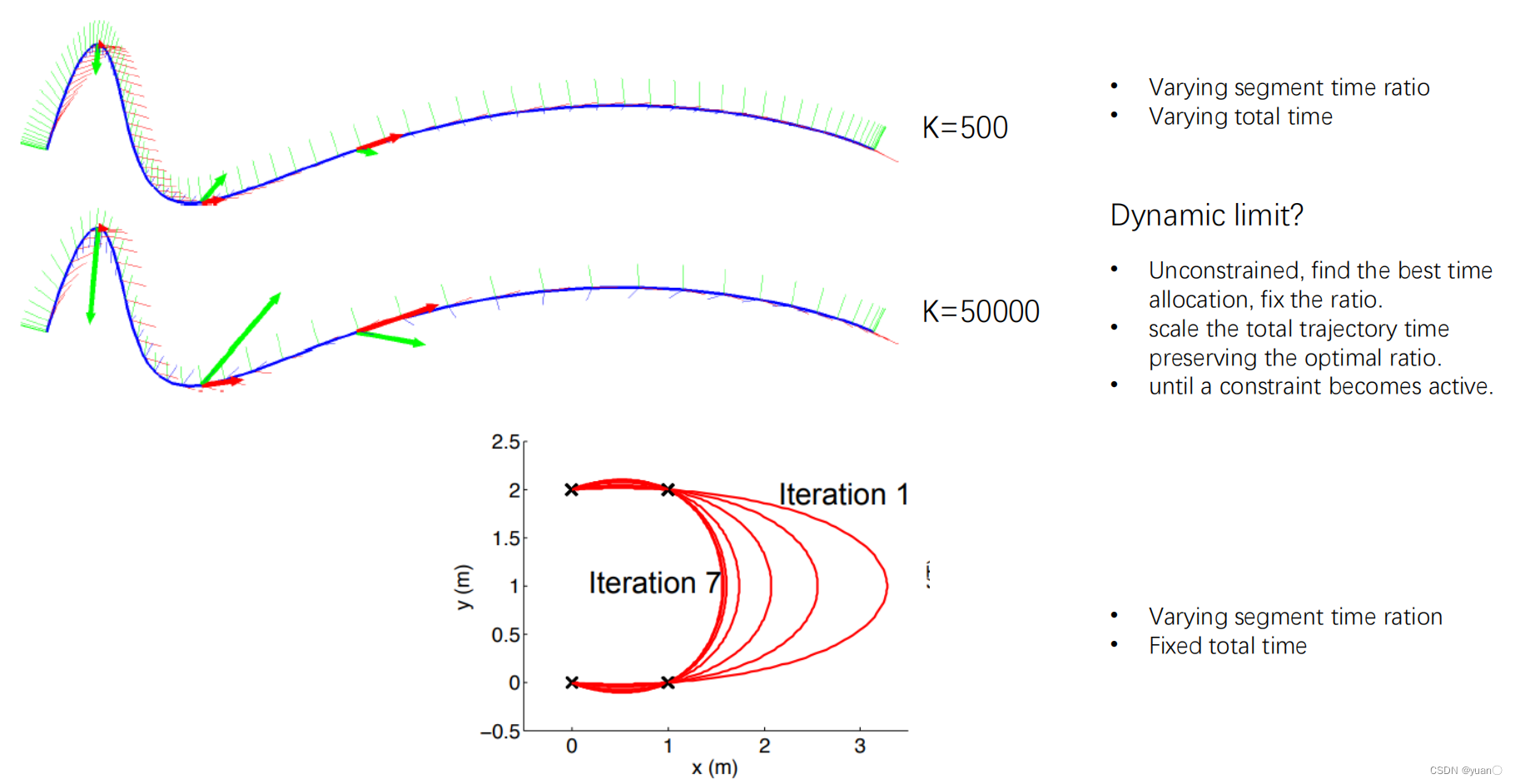
【移动机器人运动规划】04 ——轨迹生成
文章目录 前言相关代码整理: 介绍Minimum Snap OptimizationDifferential Flatness(微分平坦)Minimum-snapSmooth 1D TrajectorySmooth Multi-Segment TrajectoryOptimization-based Trajectory Generation Convex Optimization(凸优化)凸函数和凸集凸优…

149基于matlab的A星算法和PSO算法实现路径规划动画演示
基于matlab的A星算法和PSO算法实现路径规划动画演示,具有GUI界面,可自主生成障碍物。移动靶路径规划。程序已调通,可直接运行。
149 matlab A星算法 PSO算法 路径规划 (xiaohongshu.com)
基于智能算法的无人机路径规划研究(Matlab代码实现)
👨🎓个人主页:研学社的博客 💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜…
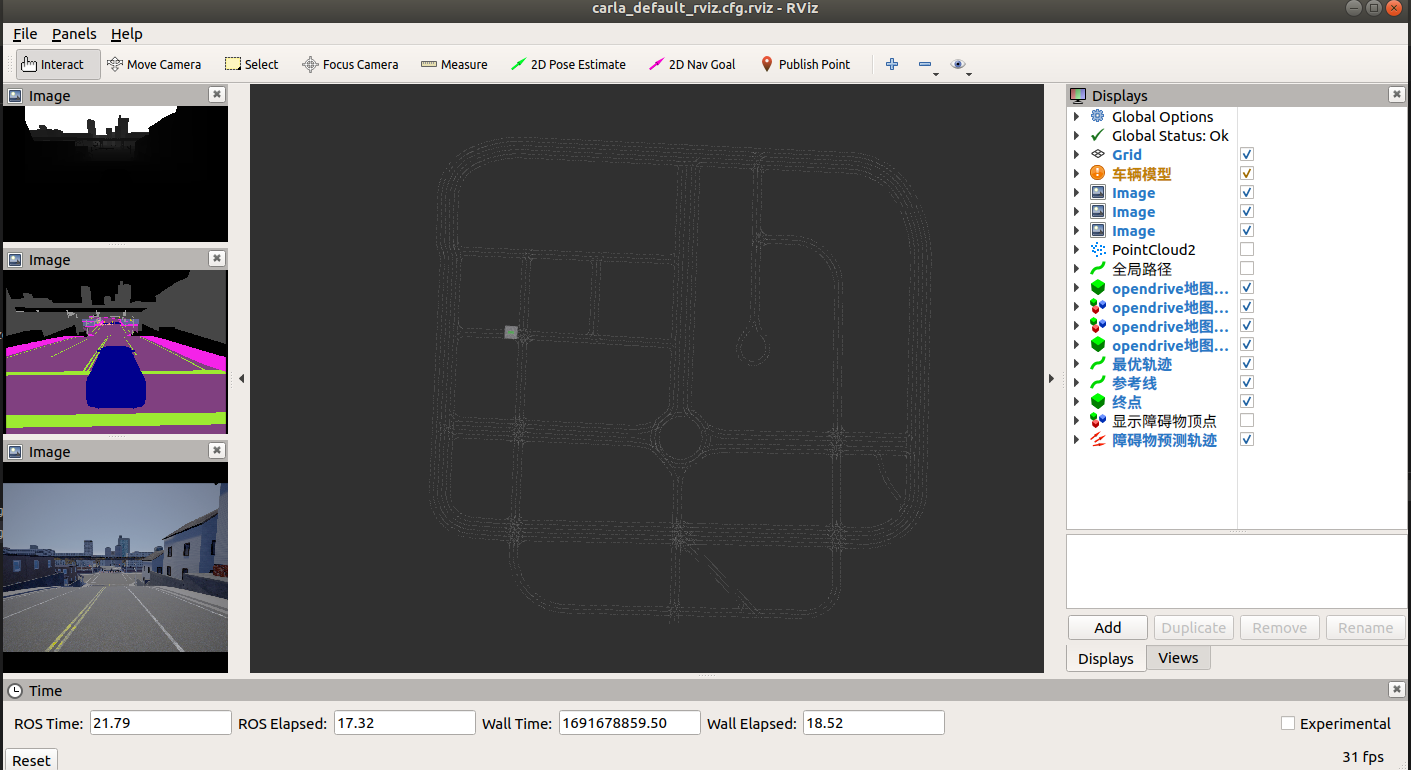
ros2移植Apollo的Lattcie的部分算法并实现与carla0.9.13的联合仿真
ros2移植Apollo的Lattcie的部分算法并实现与carla0.9.13的联合仿真
python版本说明
ubuntu18.04的ros2不能像ros1一样使用python2.7,必须是3.7!!!
选择一:系统安装的python3.7(ubuntu18.04不适用&#x…

ROS局部路径规划器插件teb_local_planner规划流程概括总结
本部分文章主要用于对ROS局部路径规划器插件teb_local_planner的规划流程进行梳理,并概括总结,本部分计划包含5~6篇文章,各文章主要内容如下: ☆第一篇:主要介绍ROS导航包Navigation中的 Movebase节点中的路径规划的相…

IOS-高德地图路径绘制显示交通状况-Swift
本文基于:高德地图路径绘制进行了路径绘制的优化,添加了根据交通信息(是否拥堵)来显示路况,效果如图:
图标资源:
custtexture_bad custtexture_green custtexture_slow custtexture_serio…
付费课程:路径规划、机器学习、运筹优化算法以及数据分析领域
目录
授课形式
学习内容可包含
附加内容
教学价格 授课形式 线上课程,一对一教学
学习内容可包含 python从入门到精通 matlab入门及保姆级程序调试方法 cplex入门到精通 运筹学方面 最优化理论-单纯形法、分支定界法、列生成法、切平面法 机器学习方面 机器学习…
Ubuntu18.04使用carla0.9.5联合仿真搭环境报错
Ubuntu18.04使用工程与carla0.9.5联合仿真报错
1
File "/home/cg/Auto_driving/src/ros-bridge/carla_ros_bridge/src/carla_ros_bridge/client.py", line 18, in <module>from carla_ros_bridge.bridge_with_rosbag import CarlaRosBridgeWithBagFile "…

动力学约束下的运动规划算法——Kinodynamic RRT*算法
一、RRT * 算法回顾 为了更好的理解Kinodynamic RRT*算法,我们先来回顾一下RRT * 算法 RRT * 先通过Sample函数随机选取一个点Xrand,然后通过Near函数找到当前树上距离Xrand最近的一个点Xnear,再通过Steer函数,沿着从Xnear到Xra…
全覆盖路径规划开源项目Clean-robot-turtlebot3关键函数解析(下)
本系列文章主要介绍全覆盖路径规划开源项目Clean-robot-turtlebot3的相关内容,包含如下四篇文章,分别介绍了开源项目Clean-robot-turtlebot3流程的概括总结、ROS坐标系常用坐标及其变换、Clean-robot-turtlebot3关键函数解析等内容。 1、全覆盖路径规划开…
关于 mapboxgl 的常用方法及效果
给地图标记点
实现效果 /*** 在地图上添加标记点* point: [lng, lat]* color: #83f7a0*/addMarkerOnMap(point, color #83f7a0) {const marker new mapboxgl.Marker({draggable: false,color: color,}).setLngLat(point).addTo(this.map);this.markersList.push(marker);},…

机器人路径规划:基于双向A*算法(bidirectional a star)的机器人路径规划(提供Python代码)
一、双向A*算法简介
传统A*算法是一种静态路网中求解最短路径最有效的方法, 它结合了BFS 算法和迪杰斯特拉算法(Dijkstra)的优点。 和迪杰斯特拉算法(Dijkstra)一样, A*算法能够用于 搜索最短路径; 和BFS 算法一样, A*算法可以用…
Android之调用高德地图或百度地图原生app
今天做一个路径规划的功能,需要使用到高德地图,或是百度地图,然后想着怎样的实现比较好。刚好也在看前程无忧,它里面就是点击导航的话会先检查本机是否安装了这些地图app,如果有的话,就直接打开使用&#x…

【AI视野·今日Robot 机器人论文速览 第五十三期】Thu, 12 Oct 2023
AI视野今日CS.Robotics 机器人学论文速览 Thu, 12 Oct 2023 Totally 25 papers 👉上期速览✈更多精彩请移步主页 Daily Robotics Papers
Pixel State Value Network for Combined Prediction and Planning in Interactive Environments Authors Sascha Rosbach, St…

D*算法超详解 (D星算法 / Dynamic A*算法/ Dstar算法)(死循环解决--跟其他资料不一样奥)
所需先验知识(没有先验知识可能会有大碍,了解的话会对D*的理解有帮助):A*算法/ Dijkstra算法 何为D*算法
Dijkstra算法是无启发的寻找图中两节点的最短连接路径的算法,A*算法则是在Dijkstra算法的基础上加入了启发函数…

机器人中的数值优化(五)——信赖域方法
本系列文章主要是我在学习《数值优化》过程中的一些笔记和相关思考,主要的学习资料是深蓝学院的课程《机器人中的数值优化》和高立编著的《数值最优化方法》等,本系列文章篇数较多,不定期更新,上半部分介绍无约束优化,…
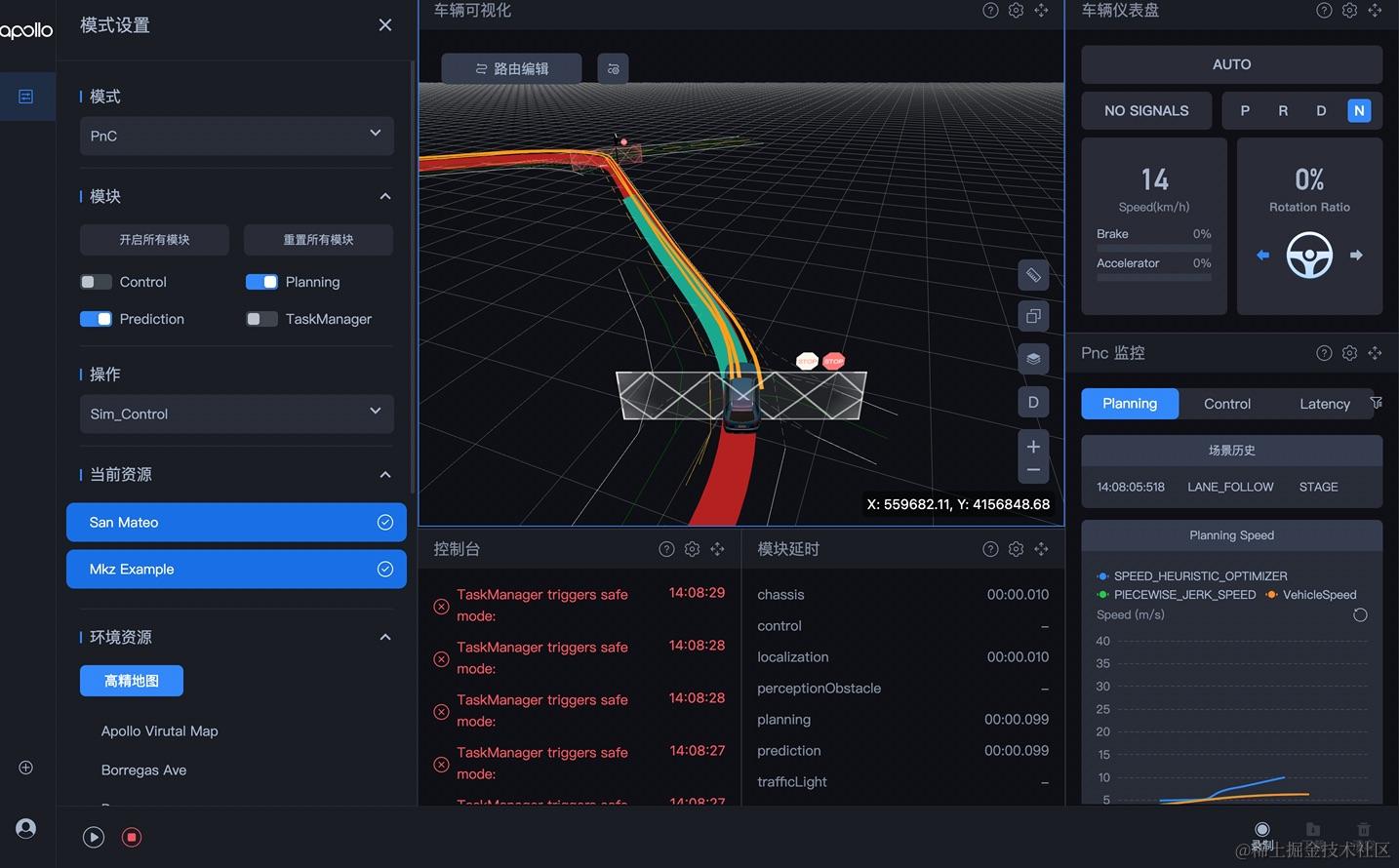
【百度Apollo】轨迹绘制:探索路径规划和可视化技术的应用
🎬 鸽芷咕:个人主页 🔥 个人专栏: 《linux深造日志》《粉丝福利》 ⛺️生活的理想,就是为了理想的生活! ⛳️ 推荐 前些天发现了一个巨牛的人工智能学习网站,通俗易懂,风趣幽默,忍不住分享一下…
JavaIO读取C101.txt文件
一、split分割带空格的字符串(四种方法及其区别)
参考:https://blog.csdn.net/yezonghui/article/details/106455940
String str "a b c d";String[] arr1 str.split(" "); //仅分割一个空格
String[] arr2 str…
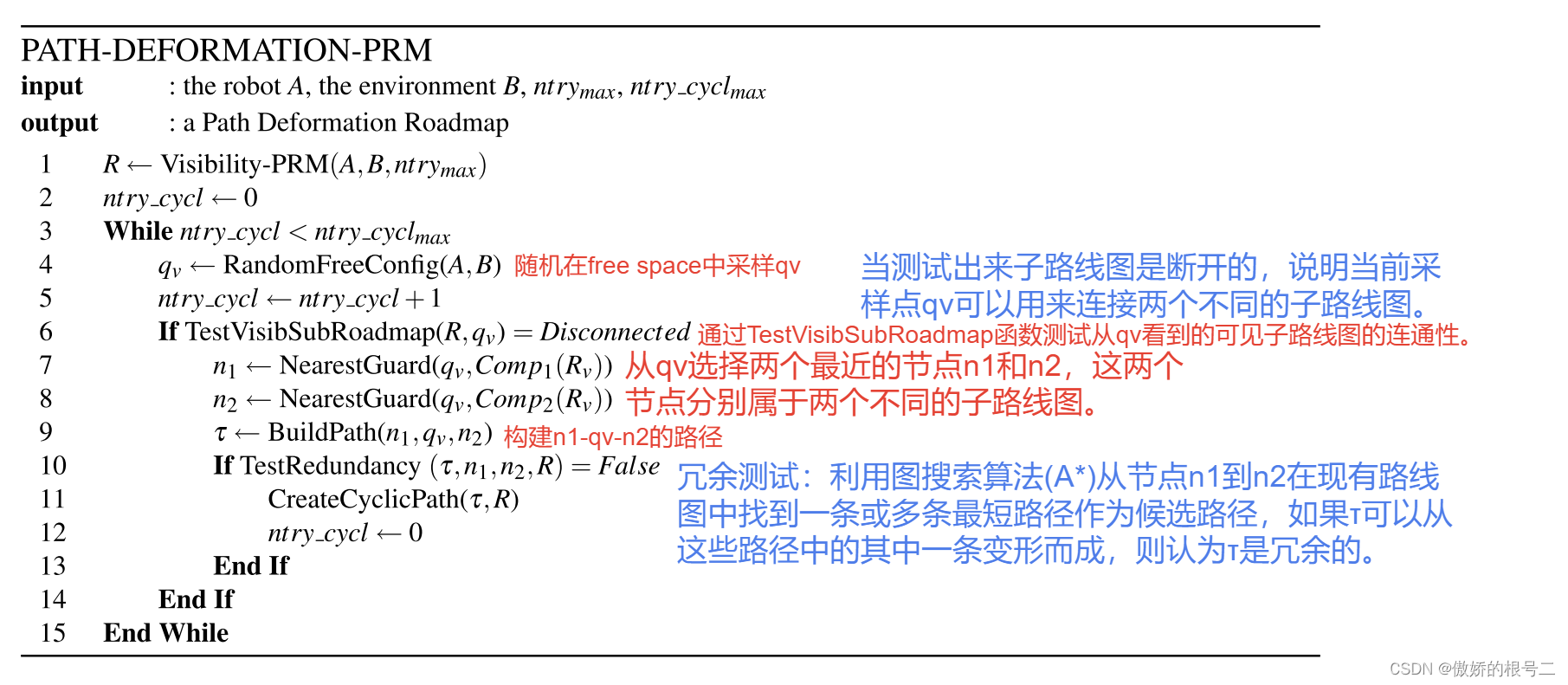
【路径规划论文整理(1)】Path Deformation Roadmaps(附带对PRM改进算法、同伦映射的整理)
本系列主要是对精读的一些关于路径搜索论文的整理,包括了论文所拓展的其他一些算法的改进思路。 这是本系列的第一篇文章: Jaillet, Lonard & Simon, Thierry. (2008). Path Deformation Roadmaps: Compact Graphs with Useful Cycles for Motion Pl…

微电网优化:基于巨型犰狳优化算法(Giant Armadillo Optimization,GAO)的微电网优化(提供MATLAB代码)
一、微电网优化模型
微电网是一个相对独立的本地化电力单元,用户现场的分布式发电可以支持用电需求。为此,您的微电网将接入、监控、预测和控制您本地的分布式能源系统,同时强化供电系统的弹性,保障您的用电更经济。您可以在连接…

机器人中的数值优化(三)—— 无约束最优化方法基础、线搜索准则
本系列文章主要是我在学习《数值优化》过程中的一些笔记和相关思考,主要的学习资料是深蓝学院的课程《机器人中的数值优化》和高立编著的《数值最优化方法》等,本系列文章篇数较多,不定期更新,上半部分介绍无约束优化,…
ROS导航包Navigation中的 Movebase节点路径规划相关流程梳理
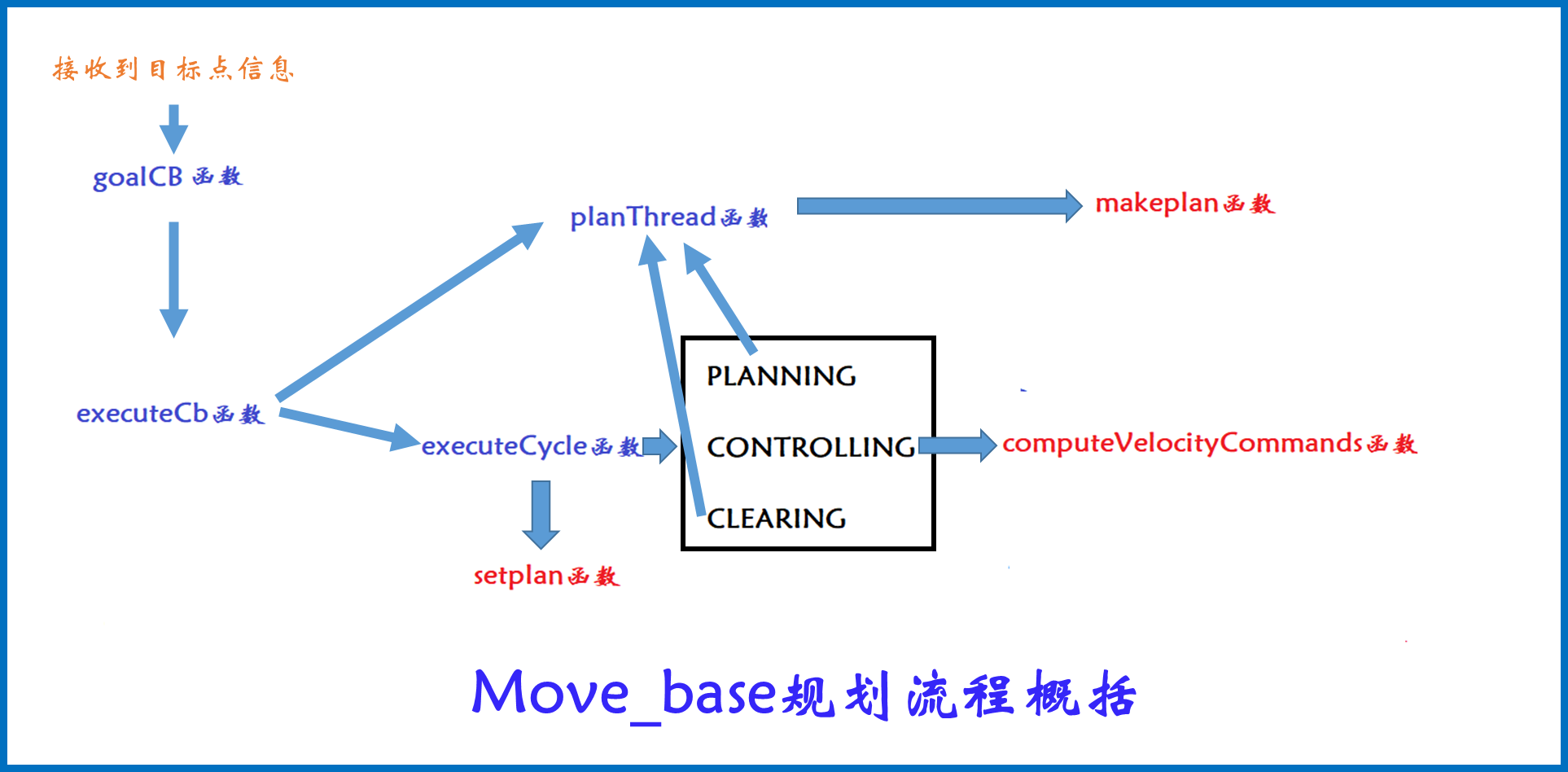
本文主要介绍ROS导航包Navigation中的 Movebase节点中的路径规划的相关流程,并对其进行梳理概括,同时本文也是《ROS局部路径规划器插件teb_local_planner规划流程概括总结》部分的前述文章。 1、接收到目标点信息goal 在接收到目标点goal之后,…
基于强化学习(Reinforcement learning,RL)的机器人路径规划MATLAB
一、Q-learning算法
Q-learning算法是强化学习算法中的一种,该算法主要包含:Agent、状态、动作、环境、回报和惩罚。Q-learning算法通过机器人与环境不断地交换信息,来实现自我学习。Q-learning算法中的Q表是机器人与环境交互后的结果&#…

ros2移植Apollo和autoware规控算法可跑工程
工程详细介绍请看: 自动驾驶路径规划控制ros移植Apollo和autoware规控算法可跑工程(适合入门学习,科研和实战)
ros2的工程版本说明
之所以增加ros2版本,是因为想增加代码的工程应用性,其实对于科研来说并…

计算机视觉实战项目2(单目测距+图像处理+路径规划+车牌识别)
车牌识别
用python3opencv3做的中国车牌识别,包括算法和客户端界面,只有2个文件,一个是界面代码,一个是算法代码,点击即可出结果,方便易用! 链接:车牌识别 大致的UI界面如下&#x…
【路径规划】(1) Dijkstra 算法求解最短路,附python完整代码
好久不见,我又回来了,这段时间把路径规划的一系列算法整理一下,感兴趣的点个关注。今天介绍一下机器人路径规划算法中最基础的 Dijkstra 算法,文末有 python 完整代码,那我们开始吧。 1. 算法介绍
1959 年,…
动力学约束下的运动规划算法——Hybrid A*算法(附程序实现及详细解释)
前言(推荐读一下) 本文主要介绍动力学约束下的运动规划算法中非常经典的Hybrid A*算法,大致分为三部分,第一部分是在传统A * 算法的基础上,对Hybrid A * 算法的原理、流程进行理论介绍。第二部分是详细分析 MotionPl…

reeds_sheep运动规划算法Python源码分析
本文用于记录Python版本zhm-real / PathPlanning运动规划库中reeds_sheep算法的源码分析 关于reeds sheep算法的原理介绍前文已经介绍过了,链接如下所示: 《Reeds-Shepp曲线学习笔记及相关思考》 《Reeds-Shepp曲线基础运动公式推导过程》 正文ÿ…

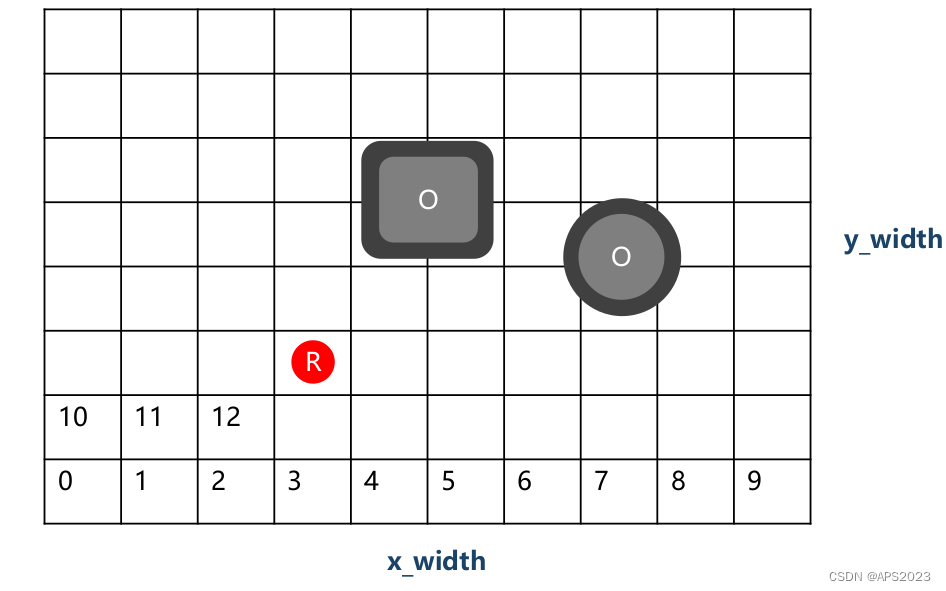
机器人路径规划之栅格地图(一)
什么是栅格地图
栅格地图:即以机器人出生点为中心,x轴和y轴的分辨率为单个格子大小,当x轴分辨率y轴分辨率时,则每个格子为一个正方形,分辨率越小则表示地图精度越高,比如一个格子大小为1cm 1cm࿰…

机器人路径规划之迪杰斯特拉算法(二)
DFS和BFS
说迪杰斯特拉算法之前,先为大家简单介绍两种常见的图论搜索算法,深度优先(DFS),广度优先(BFS)。
深度优先
深度优先就是从根节点开始,找到它的第一个子节点在找到第一个…
Routing路径系列数学建模(TSP+CVRP)
1.Traveling Salesperson Problem(TSP)
参考:维基百科TSP 给定一些城市和城市之间的距离,找到最短路径,经过每个城市最后返回起点,组合优化问题中属于NP-hard难度。对于TSP问题有两类混合整数规划模型:Miller–Tucker…

路径规划 | 详解维诺图Voronoi算法(附ROS C++/Python/Matlab仿真)
目录 0 专栏介绍1 维诺图规划原理2 ROS C实现(栅格图搜索)3 Python实现(路图搜索)4 Matlab实现(路图搜索) 0 专栏介绍
🔥附C/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等)&#…
Bug系列路径规划算法原理介绍(四)——I-BUG 算法
本系列文章主要对Bug类路径规划算法的原理进行介绍,在本系列的第一篇文章中按照时间顺序梳理了自1986年至2018年Bug类路径规划算法的发展,整理了13种BUG系列中的典型算法,从本系列的第二篇文章开始依次详细介绍了其中具有代表性的BUG1、BUG2、…
.NET 6 在已知拓扑路径的情况下使用 Dijkstra,A*算法搜索最短路径
📢欢迎点赞 :👍 收藏 ⭐留言 📝 如有错误敬请指正,赐人玫瑰,手留余香!📢本文作者:由webmote 原创📢作者格言:新的征程,我们面对的不仅仅是技术还有人心,人心不可测,海水不可量,唯有技术,才是深沉黑夜中的一座闪烁的灯塔 !背景介绍 突然闯到路径搜索算法里…
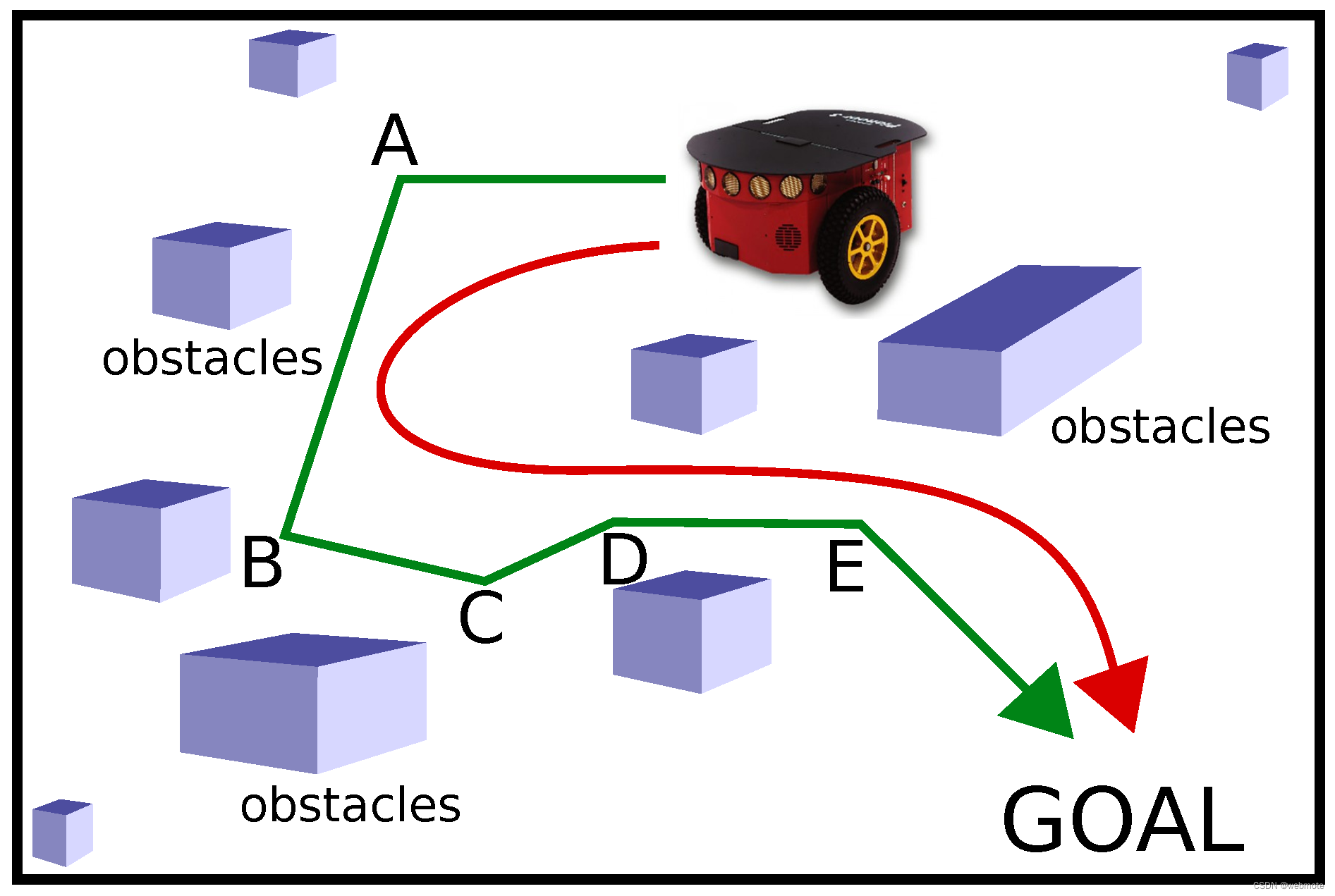
【路径规划】全局路径规划算法——蚁群算法(含python实现)
文章目录 参考资料1. 简介2. 基本思想3. 算法精讲4. 算法步骤5. python实现 参考资料
路径规划与轨迹跟踪系列算法蚁群算法原理及其实现蚁群算法详解(含例程)图说蚁群算法(ACO)附源码蚁群算法Python实现
1. 简介
蚁群算法(Ant Colony Algo…

路径规划 | 图解Theta*算法(附ROS C++/Python/Matlab仿真)
目录 0 专栏介绍1 A*算法的局限性2 Theta*算法原理图解3 Bresenham视线法4 算法仿真测试4.1 算法流程图4.2 ROS C 实现4.3 Python实现4.4 Matlab实现 0 专栏介绍
🔥附C/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备!详细介绍全…

MPC模型预测控制器学习笔记(附程序)
本文用于记录学习DR_CAN老师发布的MPC系列视频教程的相关内容,文章中放的源码也是DR_CAN老师提供的程序示例,链接如下: DR_CAN老师的视频教程链接(点击可跳转) DR_CAN老师提供的程序示例(点击可跳转&#x…

栅格地图路径规划:基于小龙虾优化算法(Crayfsh optimization algorithm,COA)的机器人路径规划(提供MATLAB代码)
一、机器人路径规划介绍
移动机器人(Mobile robot,MR)的路径规划是 移动机器人研究的重要分支之,是对其进行控制的基础。根据环境信息的已知程度不同,路径规划分为基于环境信息已知的全局路径规划和基于环境信息未知或…
机器人路径规划:基于流场寻路算法(Flow Field Pathfinding)的机器人路径规划(提供Python代码)
流场寻路算法(Flow Field Pathfinding)是一种基于流体动力学理论的路径规划算法,它模拟了流体在空间中的流动,并利用流体的运动特性来指导路径的选择。下面是流场寻路算法的基本介绍及算法描述:
1. 基本介绍 流场寻路算法通过将环境划分为网…

基于模糊神经网络的移动机器人路径规划matlab仿真
目录
1.程序功能描述
2.测试软件版本以及运行结果展示
3.核心程序
4.本算法原理
4.1 移动机器人路径规划问题概述
4.2 模糊系统与模糊逻辑
5.完整程序 1.程序功能描述
基于模糊神经网络的移动机器人路径规划
1.环境地图中的障碍物为静态、未知障碍物,可以随…
自动驾驶算法(一):Dijkstra算法讲解与代码实现
目录 0 本节关键词:栅格地图、算法、路径规划
1 Dijkstra算法详解
2 Dijkstra代码详解 0 本节关键词:栅格地图、算法、路径规划 1 Dijkstra算法详解 用于图中寻找最短路径。节点是地点,边是权重。 从起点开始逐步扩展,每一步为一…
基于A*的网格地图最短路径问题求解
基于A*的网格地图最短路径问题求解 一、A*算法介绍、原理及步骤二、Dijkstra算法和A*的区别三、A*算法应用场景四、启发函数五、距离六、基于A*的网格地图最短路径问题求解实例分析完整代码 七、A*算法的改进思路 一、A*算法介绍、原理及步骤
A*搜索算法(A star al…
深入解析基于DWA的路径规划算法
深入解析基于DWA的路径规划算法 引言1. DWA算法的基本原理2. 数学公式解析1. 轨迹生成2. 代价函数 3. MATLAB代码算例4. 结论 引言
路径规划是自动化领域中的关键问题,它涉及在给定环境中找到从起点到目标点的合适路径。本文将深入介绍一种常用的路径规划算法——基…
zhm_real/MotionPlanning运动规划库中A*算法源码详细解读
本文主要对zhm_real/MotionPlanning运动规划库中A*算法源码进行详细解读,即对astar.py文件中的内容进行详细的解读,另外本文是 Hybrid A * 算法源码解读的前置文章,为后续解读Hybrid A * 算法源码做铺垫。 astar.py文件中的源码如下ÿ…
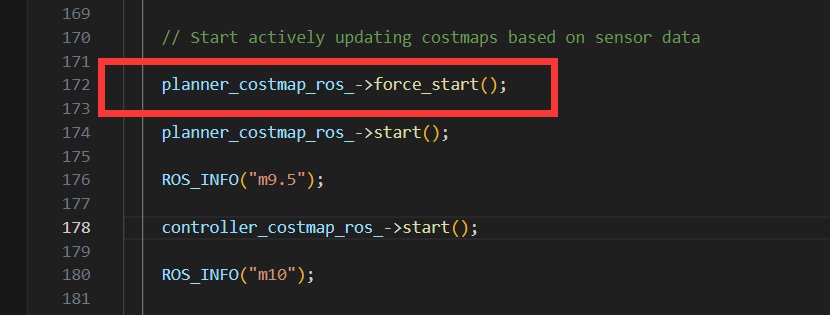
ROS机器人启动move base时代价地图概率性无法加载的原因及解决方法
最近,使用ROS机器人,在启动move_base 节点时,概率性会出现全局和局部代价地图不加载的问题,此时,发布目标点也无法启动路径规划。而且该问题有时候出现概率很低,比如启动10次,会有1次发送该情况…
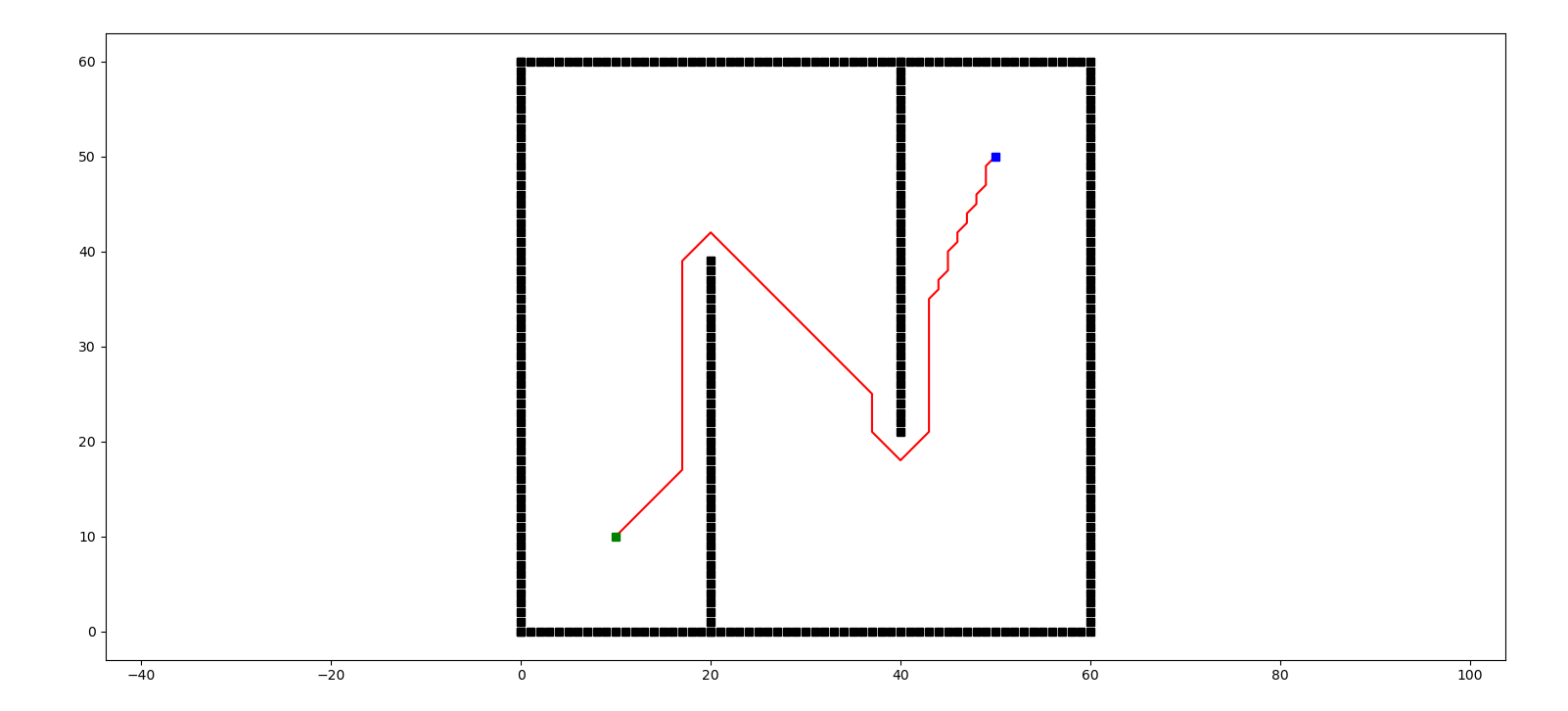
多地图-RRT算法规划路径
RRT算法
%%
%% 初始化
mapim2bw(imread(map2.bmp)); % bmp无损压缩图像500x500,im2bw把灰度图转换成二值图像01
source[10 10]; % 起始点位置
goal[490 490]; % 目标点位置
stepsize20; % RRT每步步长
disTh20; % 直到qnearest和目标点qgaol距离小于一个阈值
maxFailedAttemp…
(转载)基于蚁群算法的三维路径规划(matlab实现)
1 理论基础
1.1 三维路径规划问题概述 三维路径规划指在已知三维地图中,规划出一条从出发点到目标点满足某项指标最优,并且避开了所有三维障碍物的三维最优路径。现有的路径规划算法中,大部分算法是在二维规划平面或准二维规划平面中进行路…
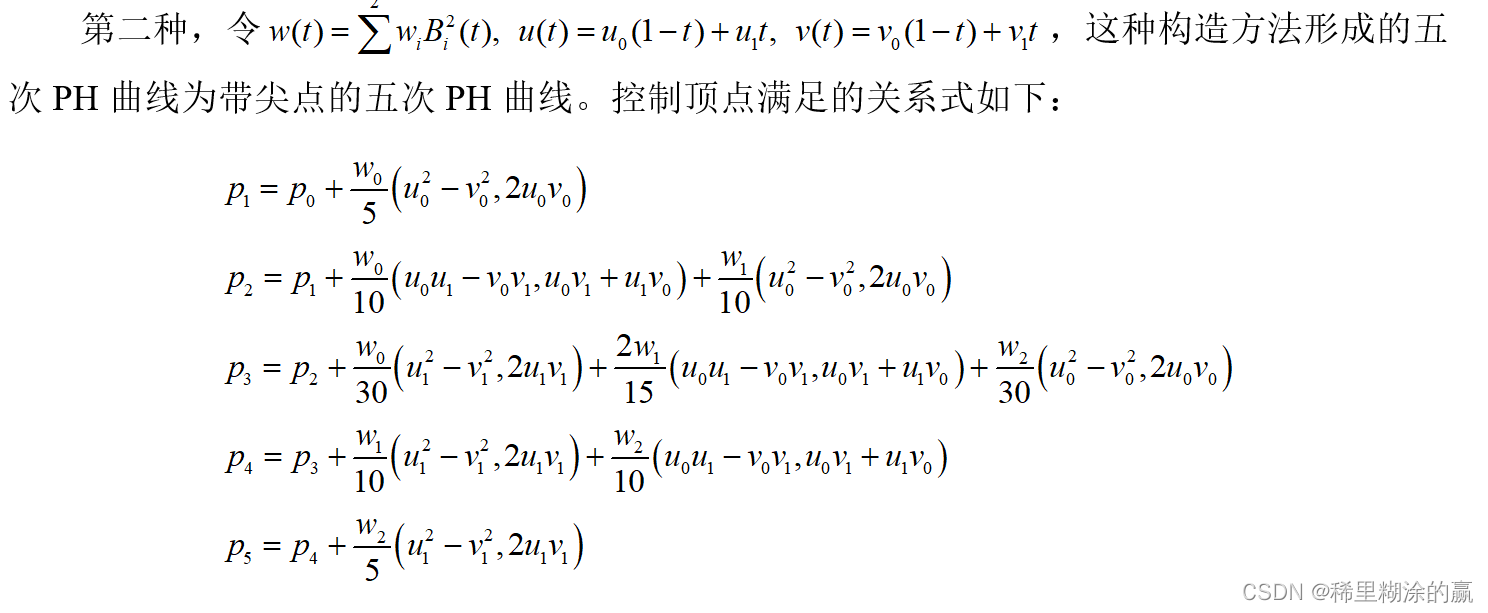
过渡曲线的构造之平面PH曲线
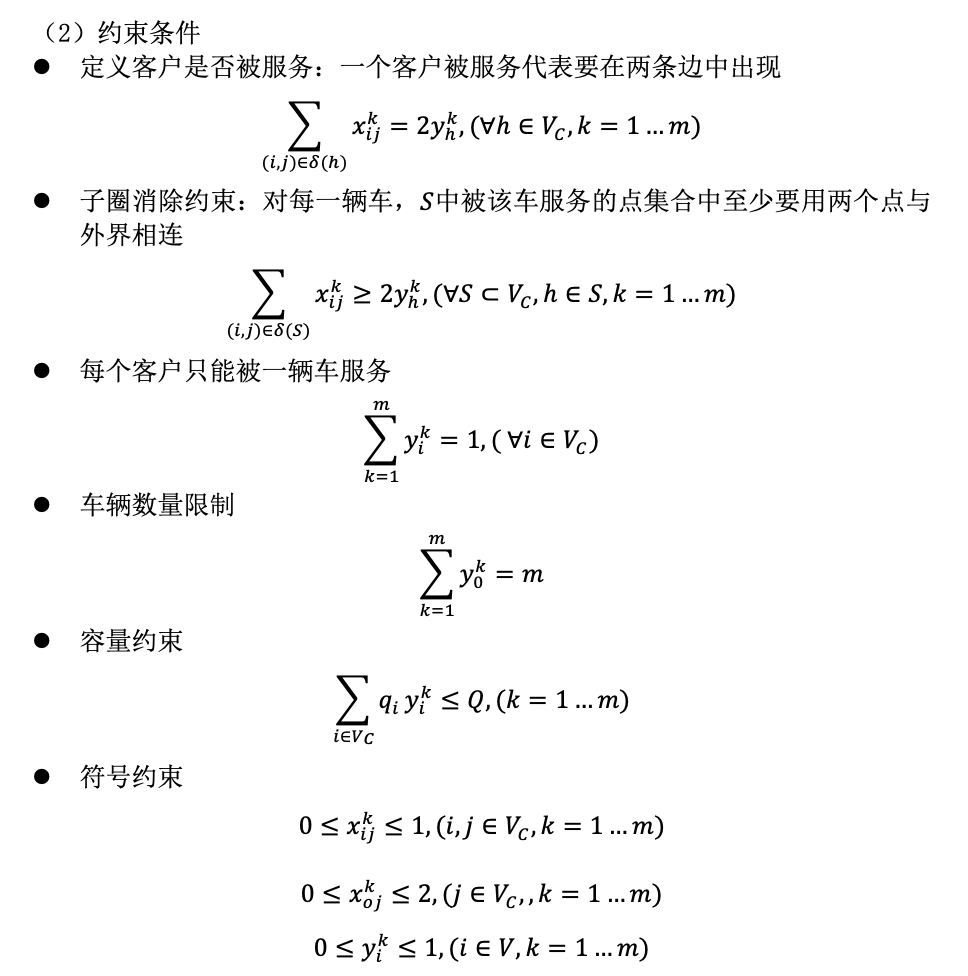
平面PH曲线的构造及其相应性质 平面PH曲线的构造及其相应性质PH曲线理论三次PH曲线的构造及性质四次PH曲线的构造及性质五次PH曲线的构造及性质非尖点五次PH曲线尖点五次PH曲线 参考文献 平面PH曲线的构造及其相应性质
过渡曲线常需要满足在连接点处位置连续、曲率连续以及切线…
C#,人工智能,机器人,路径规划,A*(AStar Algorithm)算法、源代码及计算数据可视化
Peter Hart Nils Nilsson Bertram Raphael
参考:
C#,人工智能(AI)机器人路径规划(Path Planning)的ARA*(Anytime Replanning A* Algorithm)算法与源程序https://blog.csdn.net/…

多无人机在线路径规划的新算法
南京航空航天大学自动化学院使用NOKOV度量动作捕捉系统获取多架无人机的精确位置信息,实现多架无人机协同实时路径规划。 研究背景
近年来,无人机越来越多地应用于执行战场侦察、目标识别、跟踪打击等任务。
由多架无人机协同执行任务,通过…

Graphhopper OSM地图路径规划导航 离线搭建教程
GraphHopper是一种快速且内存有效的Java导航引擎,默认使用OSM和GTFS数据,也可导入其他的数据源。支持CH(Contraction Hierarchies)、A*、Dijkstra算法。
优点:
1、算法。Dijkstra算法运行得较慢,但确实能…