elementui
面试
堆
lcd
intersect
PMP
OTA
快速幂算法
xid
Java中的File类
VMware
EDM营销
鹈鹕优化算法(POA)
Lambda表达式
光纤传感器
希尔排序
TMS320F28335
SSM框架整合
NOR Flash
元数据
RRT算法
2024/4/25 2:35:44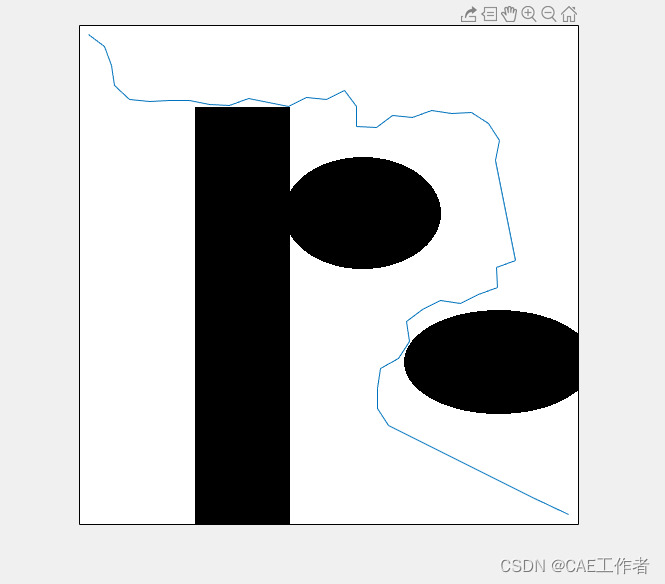
多地图-RRT算法规划路径
RRT算法
%%
%% 初始化
mapim2bw(imread(map2.bmp)); % bmp无损压缩图像500x500,im2bw把灰度图转换成二值图像01
source[10 10]; % 起始点位置
goal[490 490]; % 目标点位置
stepsize20; % RRT每步步长
disTh20; % 直到qnearest和目标点qgaol距离小于一个阈值
maxFailedAttemp…